

OPTクラウドサーベイ
3D点群処理用ソフトウェア
他の測量ソフトウェアと比較してください。
- 機能
- 使い勝手
- 価格
OPTクラウドサーベイは、点群データのクリーニング用に様々なフィルタリング機能を持ち、
高機能で安価なソフトウェアで、UAVレーザー・SLAMスキャナーなどで使用されています。
最新版:OPTクラウドサーベイ・バージョン 5.5の新機能
Kriging(クリギング)機能
UAV搭載型レーザスキャナを用いた公共測量マニュアル(案)で規定された、内挿補間で使用する「Kriging(クリギング)機能」を追加しました。同マニュアル(案)は以下のとおりです。
■公共測量マニュアル(案)<第54条 運用基準>
内挿補間は、データの密度を考慮し、TIN 法又は最近隣法を用いることを標準とする。ただし、データの欠損が多い箇所については、Kriging 法により内挿補間することができるものとする。
その他の使用例:
国土地理院、地震や火山活動に伴う座標・標高補正(非定常)
■座標・標高補正パラメータの作成の流れ(抜粋)
[2]電子基準点や三角点で検出された地殻変動量をもとに、クリギング法という補間法を用いて、約1km間隔の格子点上での地殻変動量を求めます。
Kriging法
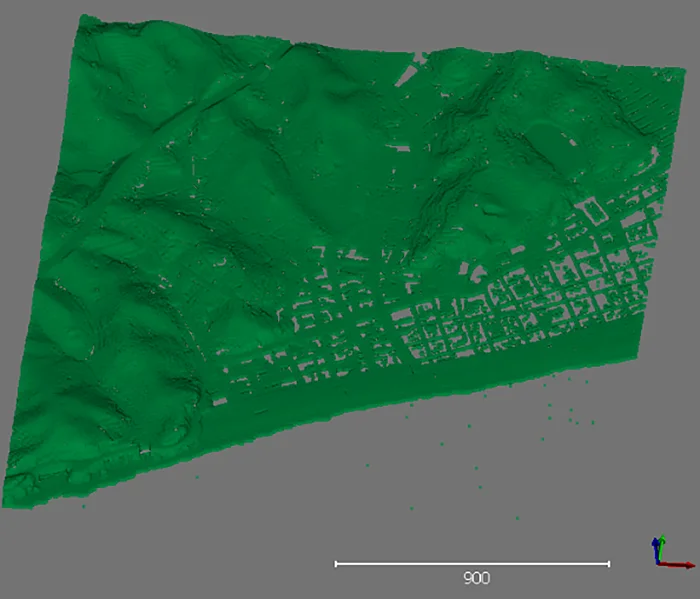
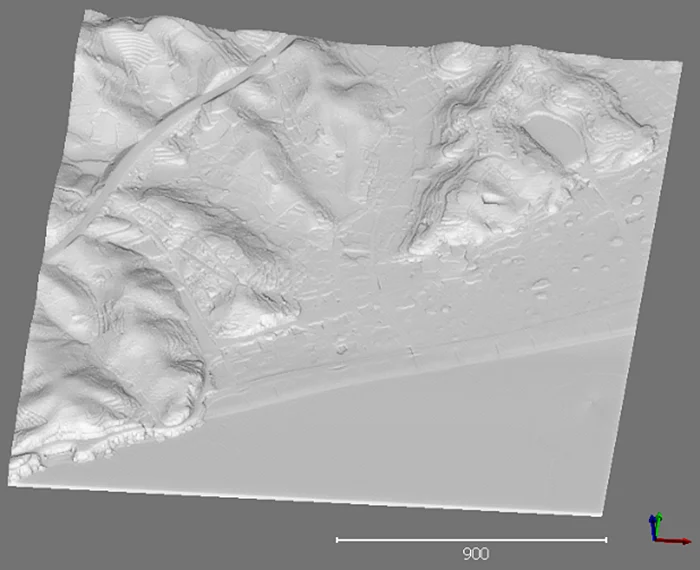
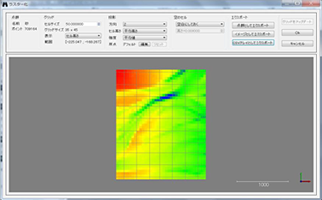
真夏の山間部をUAV Lidarで計測したデータは、空白部分が多いため以下のようにデータ欠損が多い場合に「UAV Lidar作業マニュアル(案)」で推奨している内層補間法がKriging法になります。Kriging法は、ラスタライズの空セルの設定で使用します。
■ Model:
・Spherical:球状分布 (近距離は相関が強い)
・Exponential:指数分布 (ポアソン分布)
・Gaussian:ガウス分布(正規分布)
■ kNN:補完点作成に使用する近接点数
Gaussian(ガウシアン)フィルター
bilateral(バイラテラル)フィルター
SORフィルター
SORフィルターは、点群各点の周辺分布と標準偏差を用いて、各点の周辺点群分布から外れた点を除去するフィルターです。


Smooth Laplacian(ラプラシアン)機能(メッシュ化)
Thinning機能の強化
垂直シリンダ検索機能(指定内の最高・最低・中心の座標を検索)
+型マウスポインターのサポート(GCPのクリック時に使用)
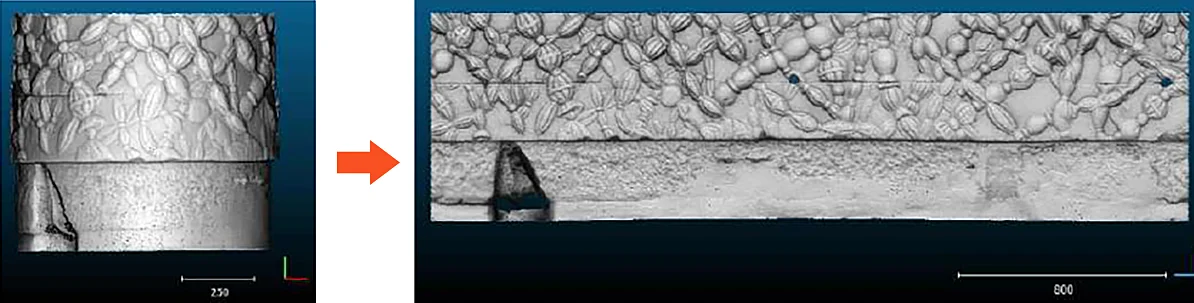
点群を円筒形(または円錐形)から平面に「展開」する(以下はサンプル画像)
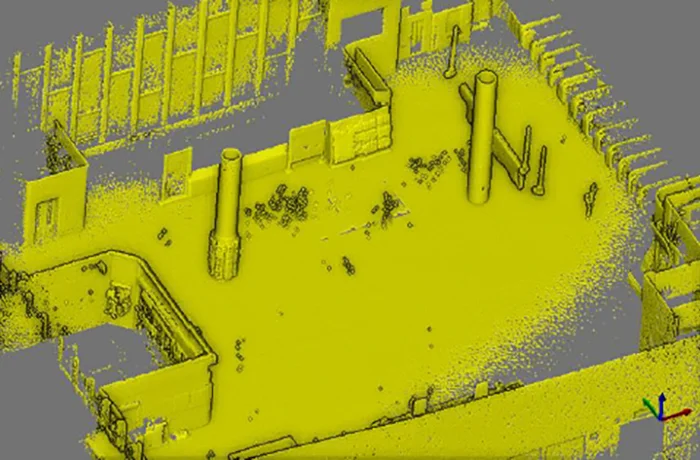
ノイズクリーニング(以下はサンプル画像)


評価版OPT クラウドサーベイ(マニュアル、練習データを含む)を以下のサイトからダウンロードできます。
-
OPTクラウドサーベイ
44万円(税込) -
OPTクラウドサーベイ+ジオイドコンバータ・バンドル版
49万5千円(税込)
ジオイドコンバータの詳細は、こちらへアクセス願います。
OPTクラウドサーベイの主な機能
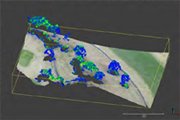
・豊富なフィルタリング機能(標高最低点抽出、植生のグループ化と削除)
膨大な点群データのフィルタリングには多くの時間がかかります。点データを自動(あるいは半自動)で編集できれば作業時間の軽減につながります。OPTクラウドサーベイには豊富なフィルタリング機能があります。設定ツールを使って点データをグループ化し不要な点データを一括削除できます。最終的な成果物は多くの場合 図面のため、図化用CADへ渡すためにもこの機能はたいへん重要です。
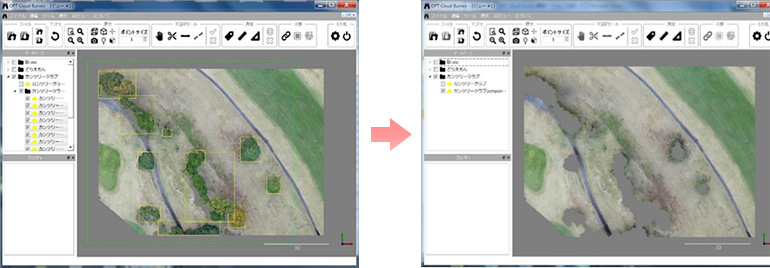
Photoscanで処理をしたXYZRGBの点群データをブロック分割して一括削除する。
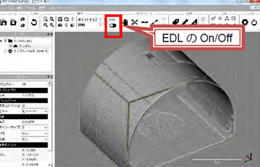
・オーバーハングのメッシュ機能(崖、トンネル)
市販の測量用3D点群処理ソフトではオーバーハングメッシュができないので困っている。そうした声を多くの測量関係者の方からお聞きしています。
トゲトゲの法面やトンネル壁面を手作業で修正することはたいへんな労力で、且つ、うまく面張りできない場合が多いと聞きます。
OPT クラウドサーベイは一回のマウスクリックで、オーバーハングのメッシュを作成できます。ご使用中のソフトにこの機能が無い場合、OPTクラウドサーベイを“メッシュ作成の専用ソフト”としてご利用いただけます。
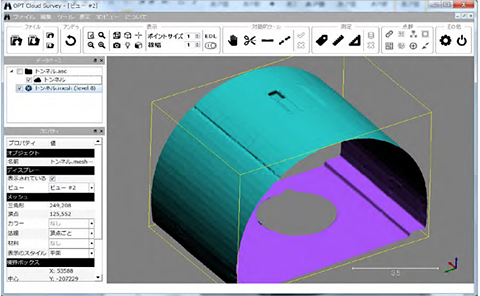
トンネルのメッシュモデル
DXFデータをインポートする
以下のサンプルデータは、オーバーハングを含むメッシュデータをDXF3DFACEで出力したDXFデータです。
貴社でご利用のソフトが「DXFインポート」をサポートしている場合、テストいただけます(インポートに時間がかかる場合があります)。
・多くの入出力フォーマットをサポートする。
サポートする主なフォーマットは以下のとおりです。
LAS, ASCII, CSV, PTX, OBJ, PLY, STL, DXF3DFACE, SHP, RASTER, DP
(DPフォーマットの圧縮率約30倍で、従来の圧縮率の10倍です)
・3Dスキャナー用ターゲットの検出
3Dスキャナーをお持ちの場合ターゲット検出ソフトとして利用できます。サポートされているターゲットタイプは以下のとおりです。
| ターゲットタイプ | 表示記号 | ターゲットタイプ | 表示記号 | ターゲットタイプ | 表示記号 |
|---|---|---|---|---|---|
| 球 |  |
風車 |  |
チェッカー盤 |  |
| 円盤(ディスク) | ") |
星 |  |
・測定
三種類の計測が可能です。
- シングルポイントプローブ
- 2点間の距離の測定
- 3点のなす角度の測定

・ラベル
ラベルは2Dエンティティとして表示されます。

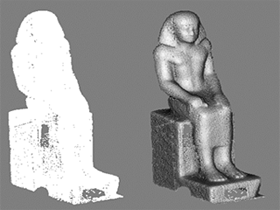
・法線ベクトルの作成
点群あるいはメッシュの法線ベクトルを計算できます。

法線ベクトル計算前の点群(左)と法線ベクトル計算後の点群(右)
・点データのラスター化
点データ
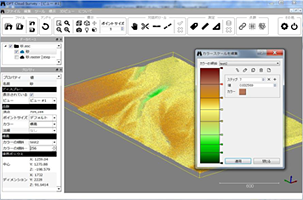
ツール>点群>ラスター化を選択します
・最遠ポイントの除去(2つの重なったデータからフィルター処理)
例えば人や自動車が行き交う道路を計測する場合、時間をずらして2回スキャンします。2回のスキャンデータをマージさせ、合致しない差分が有れば自動で削除します。マニュアル作業に比べ、大幅に作業時間を削減できます。
・ムービーの作成
3Dスキャナーが扱うデータは大量のため、施主などエンドユーザへプレゼする場合は点群データそのものよりも、ムービーでの紹介が適しています。OPT Cloud Surveyはムービーの作成機能があり、オペレータ自ら、ちょうどpdfを作成するイメージで、ムービーを作成できるようになりました。
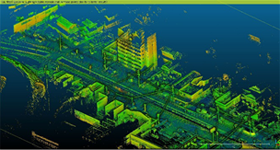
・シェーディングの作成
3DスキャナーとしてVelodyneのセンサーが測量現場で多く使われています。Velodyneセンサーは、反射強度(Intensity)の強弱の範囲が極端に狭いため、3Dレーザースキャナーのような“白黒画像”で対象物を表示することができません。シェーディング機能を追加することで、立体感のある表現を実現できるようになりました。
右:シェーディング実行後の表示
データはモバイル 3Dスキャナーで取得する。


・点データの配置で穴埋め処理を実行する
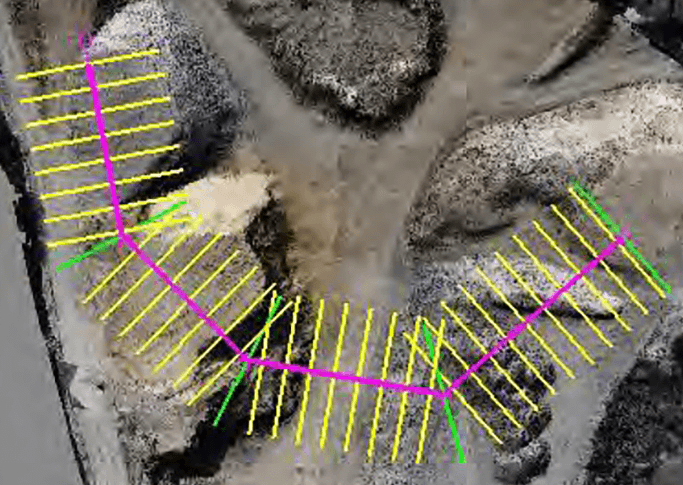
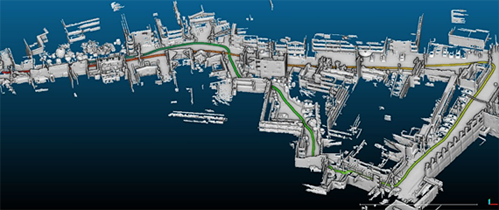
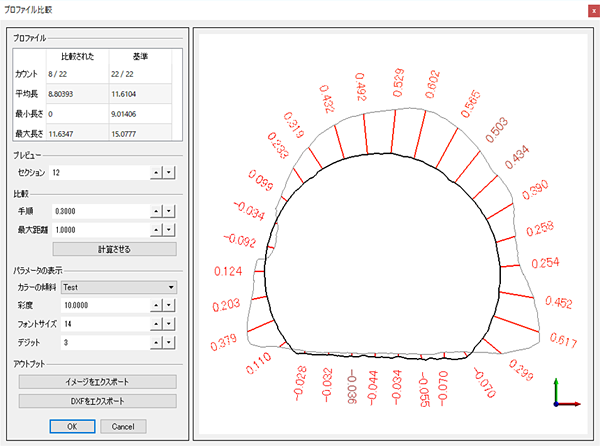
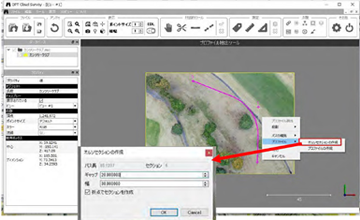
・パスに沿ったプロファイルの抽出と比較
(1)点群データからパス設定(直線と曲線に対応)を行い、ピッチと抽出幅を設定します。
(2)複数点群でも一括対応可能。法線方向の離隔距離を表示・出力できます。
・等高線
(1)ラスター化(グリッド化)内で実行できます。計算結果のデータ(ポリライン)を出力できます。
(2)ピッチなどのパラメータ設定が可能です。
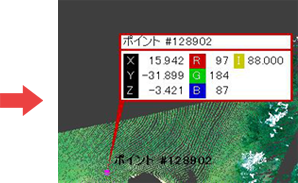
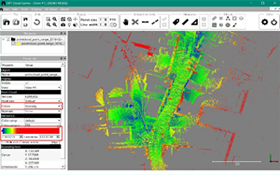
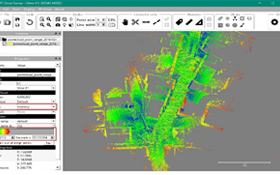
・点群表示方法の追加・・ポイントインデックス(点群取得順カラー表示及びフィルター)
(1)ポイントインデックス(データ取得順)を追加できます。
(2)強度、標高、ポイントインデックスで表示可能な範囲を設定できます。
(3)フィルター機能で表示範囲を分割、切断できます。天井・床や壁に四方を囲まれたデータの時に便利です。
ただし、表示上消しているだけでメモリー管理上はそのまま全部の点群を抱えています。
削除などのモードに入る場合は、分割、切断処理後に作業してください。

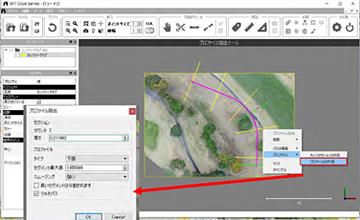
・断面データの取得(評価版内の練習データで確認できます)
(1)断面を選択し、センター線(始終点と折れ点)を決定します。
(2)折れ点を右クリックすると曲率(半径)を入力できます。
(3)ギャップ(ピッチ)と幅(計算範囲)を決定し、折れ点で計算するか、否かのチェックを選択できます。
(4)プロファイルの作成”でパラメータを入力します。“厚さ”はラインに沿って抽出する点群の幅になります。
(5)断面は、DXFやSHPファイルでポリラインとして出力できます。又、線幅や色を変更できます。
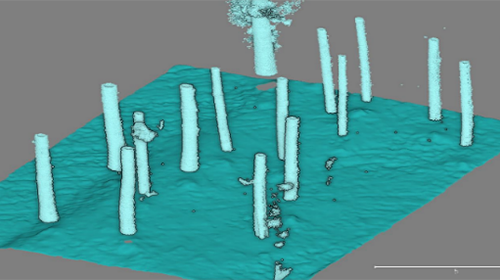
立木調査で使用する(すべての木々の胸高を自動で取得)
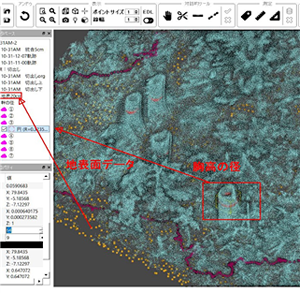
OCSで、地表面と胸高の径(1.2m)を取得する
森林内で木の位置、および胸高での直径を計測する
OPT Cloud Surveyは点群編集ソフトです。移動体3Dスキャナーを使い、森林内を歩き回りながら、点群データを取得し、OCSで点群データから胸高を計測できます。操作は最初に、地表面の点群データをメッシュデータにします。木々は点群のまま、残します。
OCSは点群の離隔距離(地表面からの距離)を再計算させる機能を持っています。この機能を使うことで胸高(例えば1.15~1.20m)のデータだけを抽出できます。仮に胸高=1.2mに固定すると、樹木もメッシュ化する必要があります(点群のため、1.2mぴったりのデータは存在しない場合があります)。抽出した帯状(必ずしも全周のデータがなくても可)の点群から、最適"円"を計算することができます。半円からでも円を作成できます。このように、すべての木々の胸高を自動で取得できます。
樹木径を検出する(地上高から任意の高さで直径を測定する)
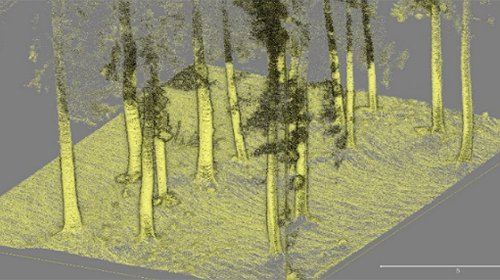
ラスター化機能を使って、10㎝(例)ピッチのデータを抽出。
樹木の不要な部分を削除(上部や地表面を削除して必要部分のみ残す)。
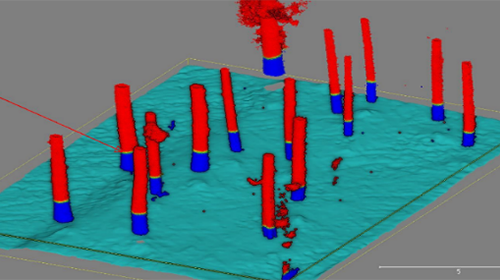
地表面から1.15m-1.25mの範囲のみ抽出。
抽出範囲は自由設定可能(赤い部分は範囲外の上部、青い部分は範囲外の下部に相当)。
検出範囲のみ抽出(地表が傾斜&凹凸があっても一定高さのみのデータが残る)。
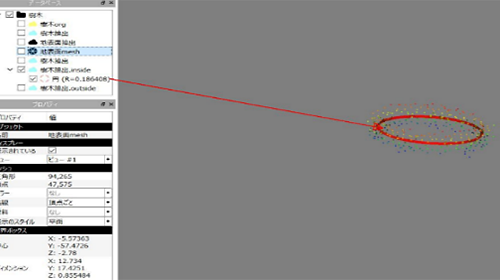
結果はTXTデータ(名称、座標、半径、周長)でも出力可能。
点群の品質が良ければ全周(360度)でなくても1/3周(120度)程度でも検出でき、円ではなく円柱(シリンダー)としても検出可能です。
OPT Cloud Surveyの機能紹介
(1)データの合成機能の強化
- シリンダーや球などのプリミティブなモデルを作成し、中心と重心の座標、及び半径を取得。
(2)測定機能の強化
- 3点から円の中心座標と半径を抽出。
- 範囲指定した点群データから、表面積と2D投影面積を算出。
(3)データの差分をカラーマップ表示
-
2つのデータから差分計算し、カラーマップ表示する。
点群対点群、点群対メッシュで実行
(4)測定データの出力強化
- 測定のフラグデータ(距離、角度等)をテキスト出力。
(5)曲率を元にしたノイズ・フィルター機能
-
曲率の大きなデータを削除する(例:地面だけを残す)。
点群データから周辺の曲率を計算し、分布状況を表示する。


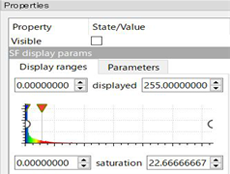
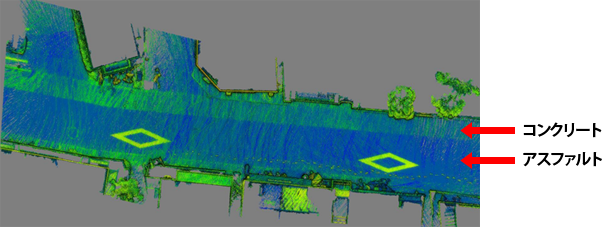
(6)-1 Intensityデータ(0-255)の再割り付け
-
問題点:値は0-255の内、0-20付近で全体の90%が集まる。
濃淡が無いため、白黒表示できず、図化作業に不向き。
解決策:0-255全体に渡って広げる。
(6)-2 ドローンレーザーのデータに色情報を付加する。

従来:
ドローンレーザーのデータをOCSで”LAS変換”出力して、
CloudCompareで表示したもの。
今後:
このLASにRGB情報を付加することで、
カラー点群を表現可能となる。図化ソフト
(ピタゴラスCAD+GISなど)でも再現する。
カメラによる色付きのデメリットを解消:
- カメラだとカリブレーションが必要。カメラとセンサーの取付け位置が異なるため通常、色ズレが発生し、図化に不向き。
- OCSによる色付きでは、色ズレの問題は発生しない。
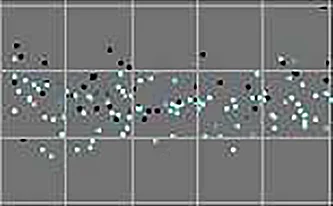
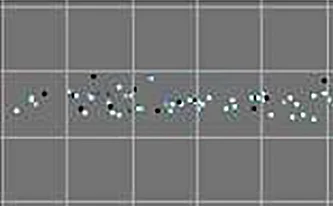
(7)距離レンジによるフィルター機能の追加
- 一定距離以上に存在する不要なデータを削除する。
距離レンジの実行前(左)と後(右)
地上型3Dスキャナーでも使用可能。例えば、
より近い距離から計測したスキャンデータを優先する。対象物の表面で、点の厚み(バラツキ)がより少ないスキャンデータを優先的に採用する。採用の選択では操作性を考え、スライドバーで対応。
(8)点群データにRGB情報を付加する
- Metashape等で出力したオルソ画像、GeoTiff画像、Google EarthのRGB情報を付加する。

移動体スキャナーのデータをxyzrgb点群データで出力可能
・その他の機能:
・UNDO/REDO、ターゲットのアライメント、ポリラインの作成、標高段彩と断面の作成など