NextCore RN100 販売価格 お問い合わせください
NextCore Fusionソフトウェアの使用は無料
点群データはクラウドで処理する(LASデータの作成)。処理時間は数十分
他社の場合多くは、データ処理は有料ですが、RN100は年額費用なし・無料です。
推奨飛行高度: RN100は50~100m
災害時、現場では携帯通信が使えない。
データは取れたようだか、クラウドを使わずに確認したい、可能か?→可能です

ドローンレーザーを導入された多くの会社が、「コース間の位置合わせで発生するズレ」に悩んでおられます。弊社にご相談下さい。弊社が販売する「コース間の自動位置合わせソフトウェア」をご試用いただけます。未使用と比べて、合成精度を大幅に改善します。
詳細は、こちらをご参照下さい。
ドローンレーザー RN100
土量計算や地形測量に使用
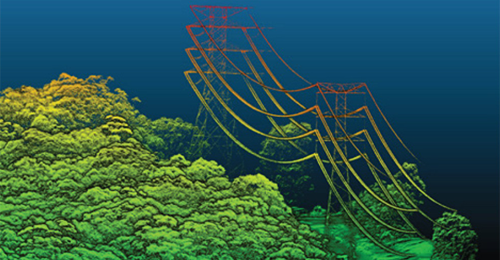
NextCoreドローンレーザーは、木々が極端に密集していない場合であれば、樹木下の地表から点群データを取得できます。3Dモデル作成、起工測量、土量比較、設計(施工計画)に利用可能です。また、急傾斜地など立ち入り困難現場での測量が可能です。さらに、土木工事では、現場作業を中断することなく、短時間で土量を算出可能です。
ドローンレーザーのデータから土量算出を作成し竣工までの業務の効率化を図ることが可能です。また、災害計測調査、森林調査やスマート林業(森林保全)にも使用できます。
RN100を使って対地高度100mで測量した事例は、こちらへ
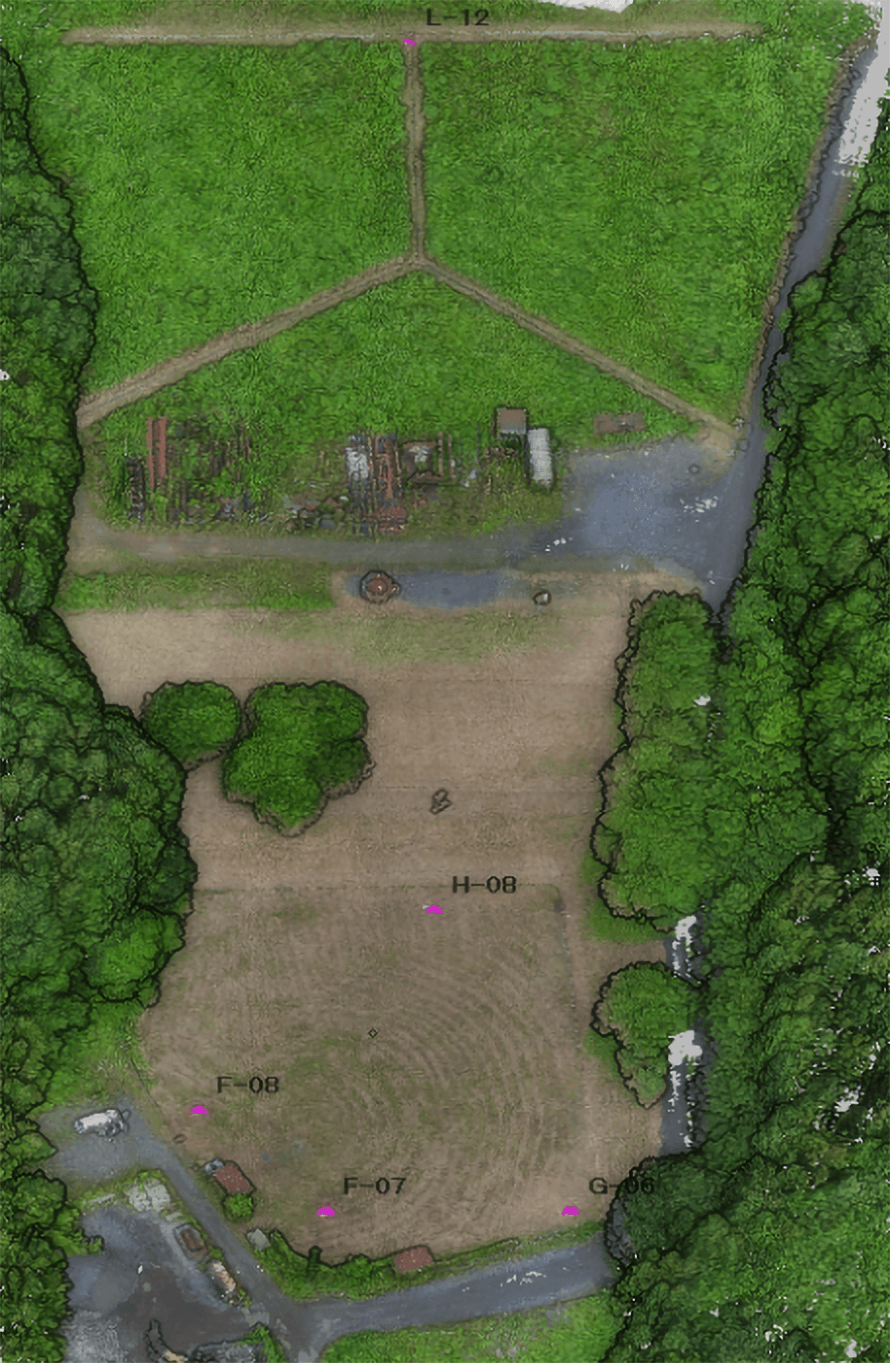
ユーザ事例 ① :とちぎUAVフィールドでの精度検証の結果、誤差(RMS)は2.9cm以下となる

以下で示す例は、ドローンレーザー RN50を使用し、フライトラインの自動合成はStripAlignソフトウェアで処理し(合成時間約15分)、および、点群データ処理ソフトウェアはOPT Cloud Surveyを使用しました。精度検証の結果、誤差(RMS)は2.9cm以下となりました。
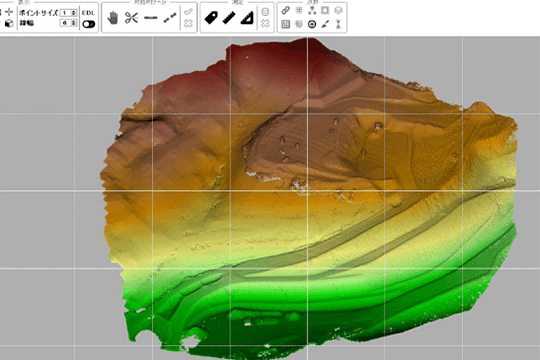
上記画像の左は解析前のデータ、右は解析後のデータ。右側のカラーマップはZ値で、下の黒が0cmで上の白まで50cm

DXFラインデータで出力可能)
精度確認表 (JGD2011 標高データ)
【基準点配置】





| GNSS測量 | NextCore計測値 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 番号名 | 実測X | 実測Y | 実測Z | X | Y | Z(標高) | 誤差X | 誤差Y | 誤差Z |
| F-07 | 43985.000 | -23010.000 | 101.360 | 43985.002 | -23010.015 | 101.338 | -0.002 | 0.015 | 0.022 |
| F-07 | 43985.000 | -22985.000 | 101.806 | 43985.006 | -22985.002 | 101.794 | -0.006 | 0.002 | 0.012 |
| G-06 | 43960.000 | -23035.000 | 101.520 | 43960.003 | -23035.020 | 101.484 | -0.003 | 0.02 | 0.036 |
| H-08 | 43935.000 | -22985.000 | 102.804 | 43935.011 | -22984.962 | 102.836 | -0.011 | -0.038 | -0.032 |
| L-12 | 43835.000 | -22885.000 | 126.365 | 43835.034 | -22885.000 | 126.332 | -0.034 | 0 | 0.033 |
|
RMS(平均二乗誤差)X=1.628cm STDV(標準偏差)X=0.01322 |
RMS(平均二乗誤差)Y=2.036cm STDV(標準偏差)Y=0.02276 |
RMS(平均二乗誤差)Z=2.841cm STDV(標準偏差)Z=0.02752 |
|||||||
ドローンレーザーの導入を検討されておられるユーザ様へ
評価用に上記のデータをご提供いたします。
ドローンレーザーのデータ処理をご覧になりたいユーザ様へ
オリジナル(未処理)の点群データから、コンタ作成まで一連の作業をご覧いただけます。
ドローンレーザーを所有するユーザ様にとって、データ処理での最大の難点は、「コース間のデータ合成」であり、もっとも時間を浪費してしまう作業です。「データの合成がうまくいかない」という声を多く聞いています。この問題に解決するため弊社は最適な解析ソフトウェアを用意しており、デモでは、バッチ処理による「自動・コース間のデータ合成」を中心にご紹介いたします。その他、地表データと植生等データの分離、メッシュ作成をご紹介いたします。お気軽にオンラインデモをお申込みください。
Zoom オンラインデモのご案内
- 所要時間は約1時間です。
- 使用するビデオ会議システム Zoom
以下のサイトより、デモの予約をお願いいたします。

※NextCoreは、JGD2011に対応していますが値が楕円体高のデータとなります。
その為、弊社では、最終成果出力用にジオイドコンバーター(LAS標高変換ツール)を用意しています。
上記、精度検証は、このツールを使用し標高変換したデータを利用し行っています。
【基準点ー全点配置図】
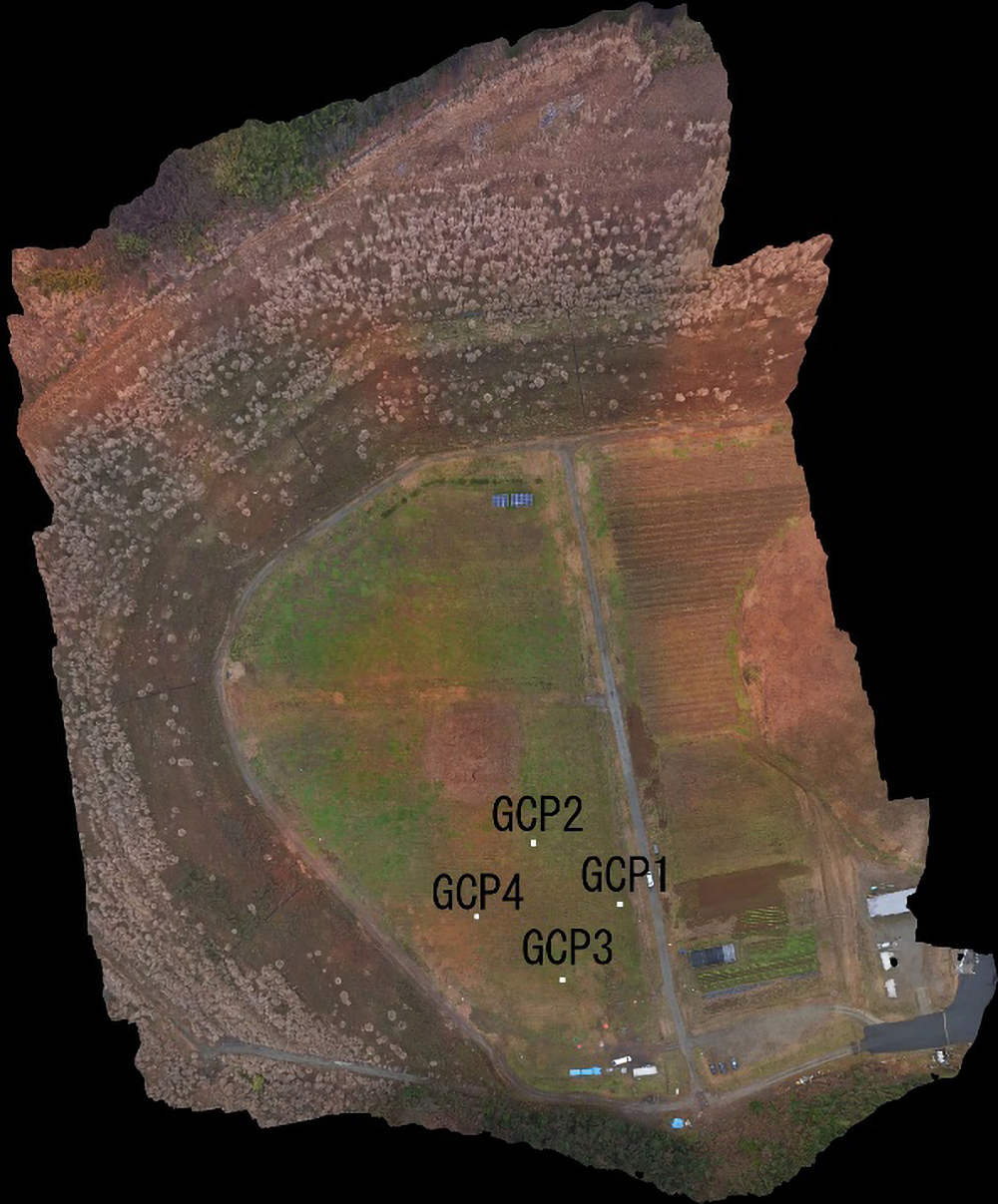
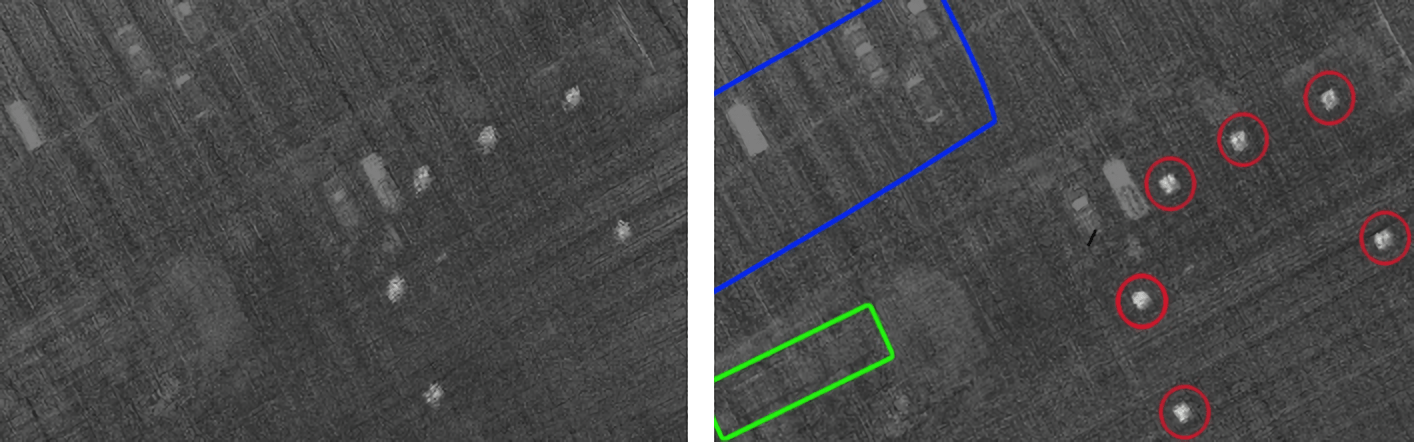
ユーザ事例 ② :RN100にて対地高度100mから測量する。誤差(RMS)は3.4cm以下となる

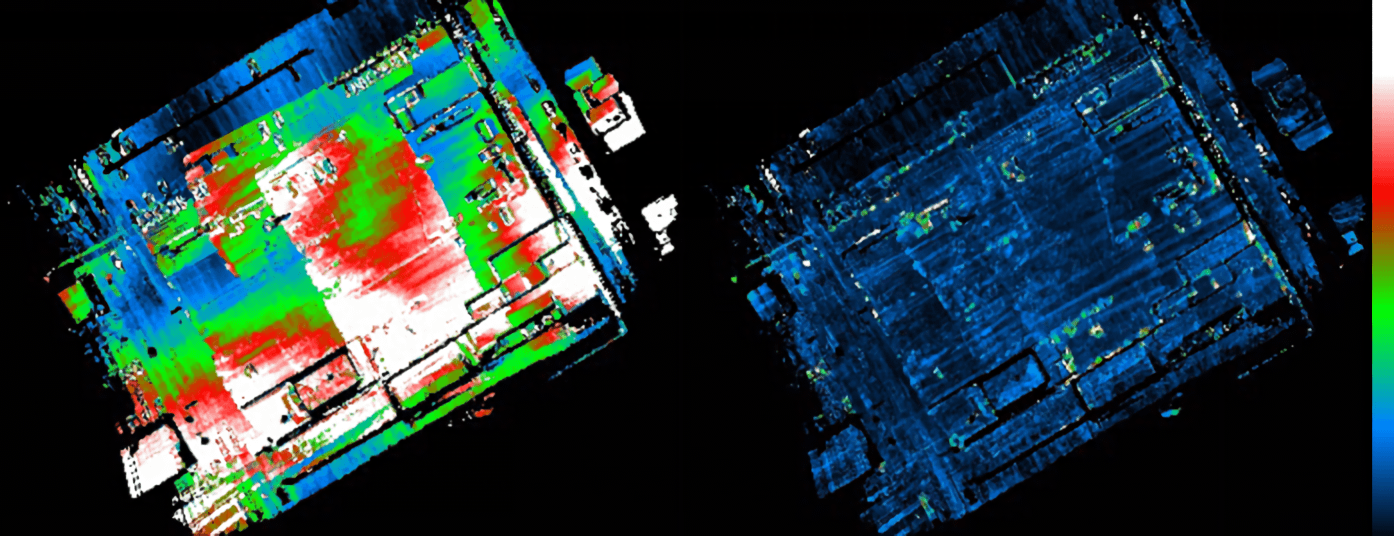
以下で示す例は、ドローンレーザー RN100を使用して対地高度100mで測量しました。フライトラインの自動合成はStripAlignソフトウェアで処理し(合成時間約20分)、および、点群データ処理ソフトウェアはOPT Cloud Surveyを使用しました。精度検証の結果、誤差(RMS)は3.4cm以下となりました。
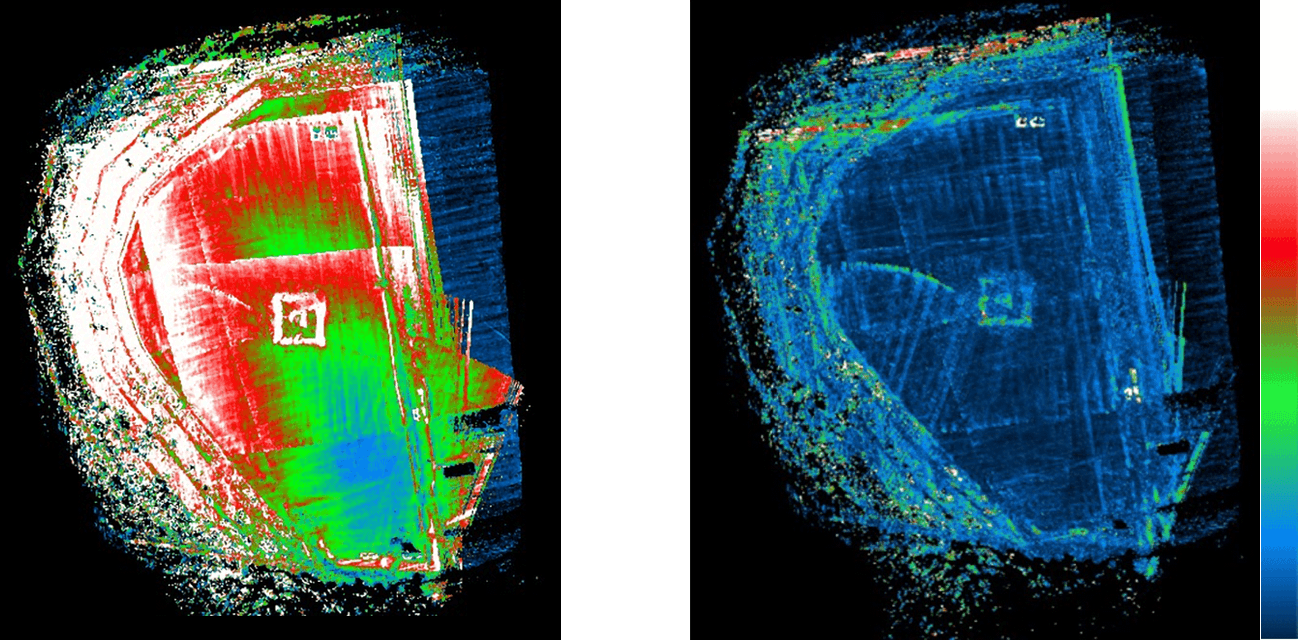
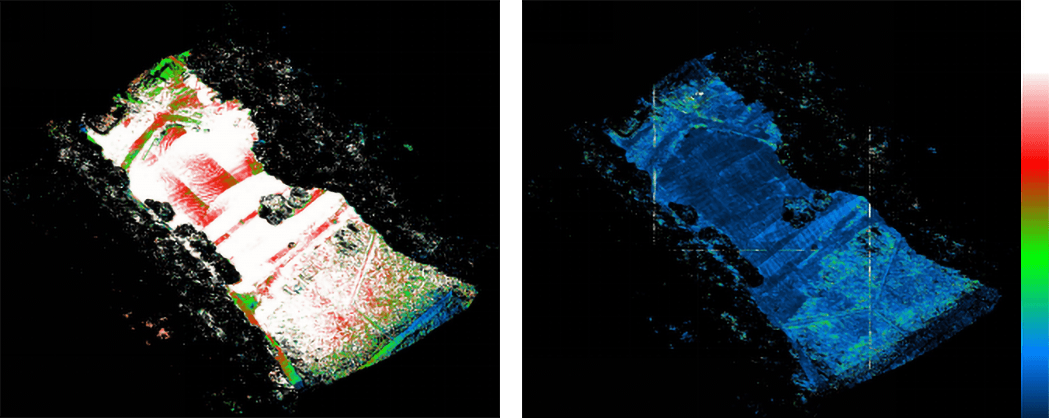
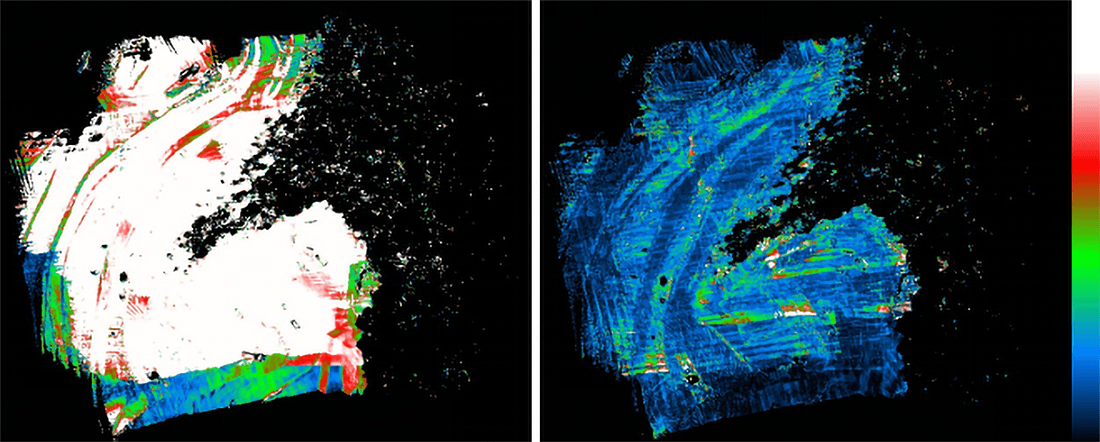
上記画像の左は解析前のデータ、右は解析後のデータ。右側のカラーマップはZ値で、下の黒が0cmで上の白まで50cm。
左は、白色の50cm以上の誤差が発生している。右は、大多数の領域が誤差10cm程度の水色に収まる。
DXFラインデータで出力可能)
断面作成(OPT Cloud Surveyを使用して断面を表示)
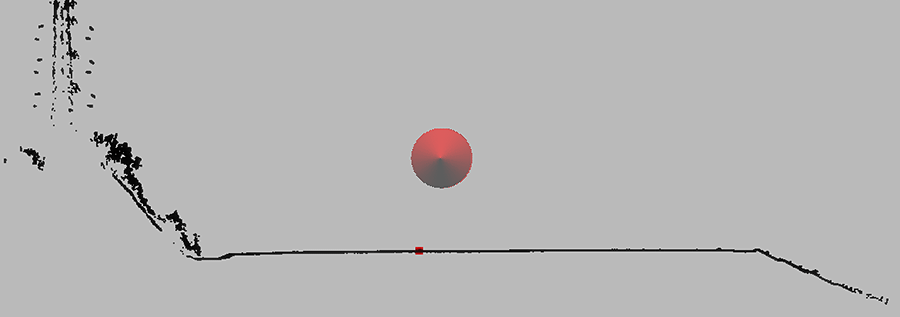

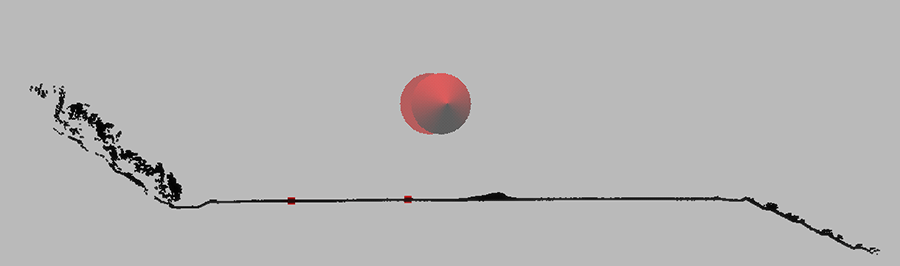
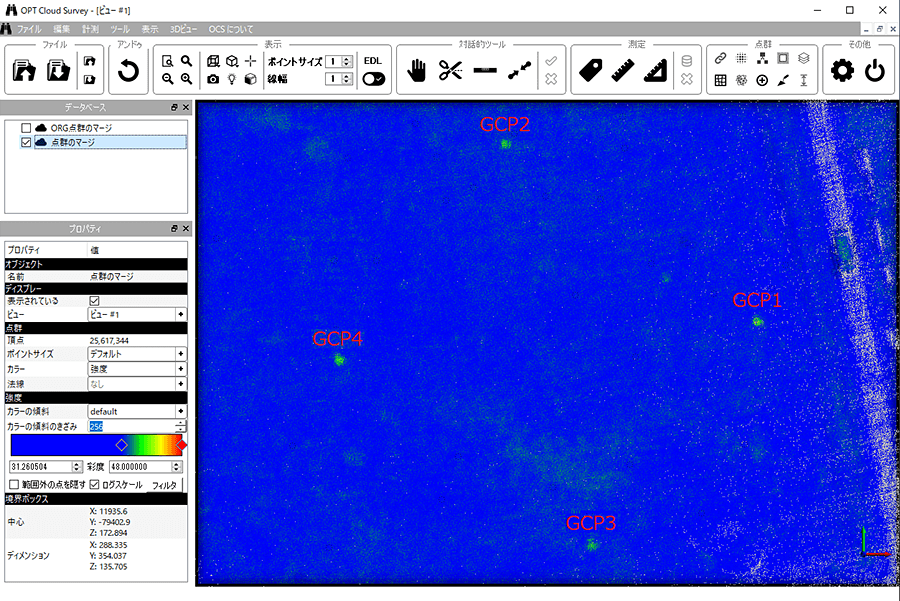
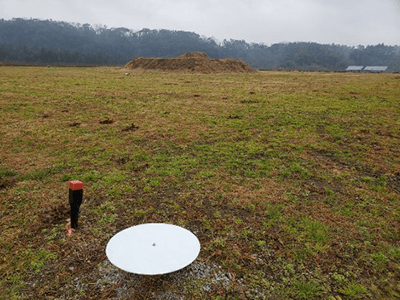
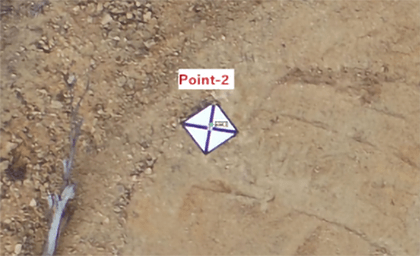
OPT Cloud Surveyを使用して精度検証時、強調表示を使用して対空標識を見易くして計測する。
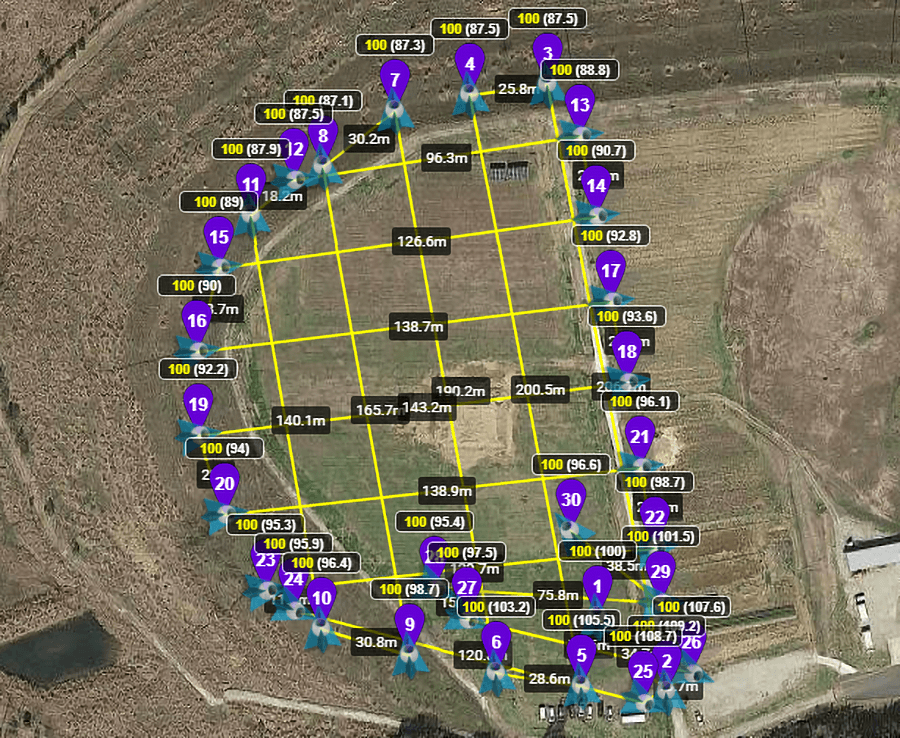
以下のとおり、高度100mで取得した点群から対空標識を識別できる。
精度確認表 (JGD2011 標高データ) 【基準点配置】


| 対空標識座標値 | NextCore計測値 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 番号名 | 実測X | 実測Y | 実測Z | X | Y | Z(標高) | 誤差X | 誤差Y | 誤差Z |
| GCP1 | -79433.724 | 11981.481 | 98.170 | -79433.757 | 11981.468 | 98.126 | 0.033 | 0.013 | 0.044 |
| GCP2 | -79414.359 | 11954.183 | 98.256 | -79414.386 | 11954.172 | 98.226 | 0.027 | 0.011 | 0.03 |
| GCP3 | -79457.978 | 11963.539 | 97.819 | -79457.066 | 11963.514 | 97.824 | -0.008 | 0.025 | -0.005 |
| GCP4 | -79437.816 | 11936.201 | 97.856 | -79437.866 | 11936.199 | 97.821 | 0.05 | 0.002 | 0.035 |
| ご連絡:フライト当日はほぼ無風状態のため安定飛行ができ、誤差は想定以上に良い値となりました。しかしながら、天候、地形、周辺の環境等に影響されるため、常に良い数値が取得できるものではありません。 |
RMS(平均二乗誤差) X=3.31cm STDV(標準偏差) X=0.02437 |
RMS(平均二乗誤差) Y=1.516cm STDV(標準偏差) Y=0.00946 |
RMS(平均二乗誤差) Z=3.196cm STDV(標準偏差) Z=0.02146 |
||||||
※NextCoreは、JGD2011に対応しておりますがZ値が楕円体高のデータとなります。
その為、弊社では、最終成果出力用に ジオイドコンバーター(LAS標高変換ツール)を用意いたしております。
上記、精度検証は、このツールを使用して標高変換したデータを利用して行っております。
【基準点ー全点配置図】
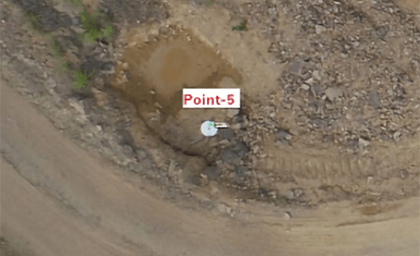
ユーザ事例 ③ :採石場での精度検証の結果、誤差(RMS)は3.4cm以下となる
ドローンレーザーは地形の起伏も分かるため、短時間で正確に土量を測ることができ、地形の変位量の観測にも利用可能です。ドローンと同時に撮影したカメラ画像からオルソ画像を作成し、点群データに貼り付けることができます。カラー点群は工事現場を鮮明に可視化できます。以下で示す例は、ドローンレーザー RN50を使用し、フライトラインの自動合成はStripAlignソフトウェアで処理し(合成時間約15分)、および、点群データ処理ソフトウェアはOPT Cloud Surveyを使用しました。精度検証の結果、誤差は3.4cm以下となりました。

上記画像の左は解析前のデータ、右は解析後のデータ。右側のカラーマップはZ値で、下の黒が0cmで上の白まで50cm

OPT Cloud Surveyソフトでオルソ画像を取込み、カラー点群を作成する
精度確認表(JGD2011 標高データ)
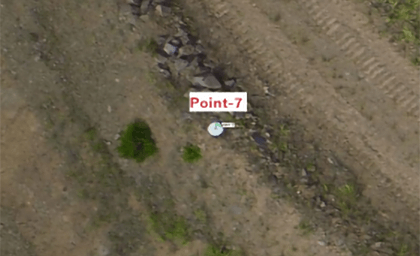
【基準点配置】Point-1-Point-7




| GNSS測量 | NextCore計測値 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 番号名 | 実測X | 実測Y | 実測Z | X | Y | Z(標高) | 誤差X | 誤差Y | 誤差Z |
| 1 | -84570 | -54247 | 174.724 | -84570 | -54247 | 174.7 | 0.057 | -0.029 | 0.0048 |
| 2 | -84559 | -54253 | 175.003 | -84559 | -54253 | 175 | 0.049 | -0.046 | 0.0227 |
| 3 | -84602 | -54265 | 174.269 | -84602 | -54265 | 174.3 | -0.02 | 0.033 | 0.0006 |
| 4 | -84572 | -54292 | 169.423 | -84572 | -54292 | 169.5 | -0.017 | 0 | -0.0479 |
| 5 | -84585 | -54321 | 159.042 | -84585 | -54321 | 159 | -0.039 | -0.015 | 0.0339 |
| 6 | -84509 | -54288 | 146.193 | -84509 | -54288 | 146.2 | 0.013 | 0.004 | 0.0004 |
| 7 | -84547 | -54332 | 148.993 | -84547 | -54332 | 149 | 0.004 | 0.004 | -0.0008 |
|
RMS(平均二乗誤差)X=3.39cm STDV(標準偏差)X=0.03589 |
RMS(平均二乗誤差)Y=2.479cm STDV(標準偏差)Y=0.02569 |
RMS(平均二乗誤差)Z=2.385cm STDV(標準偏差)Z=0.02568 |
|||||||
※NextCoreは、JGD2011に対応していますが値が楕円体高のデータとなります。
その為、弊社では、最終成果出力用にジオイドコンバーター(LAS標高変換ツール)を用意しています。
上記、精度検証は、このツールを使用し標高変換したデータを利用し行っています。
【基準点ー全点配置図】

参考データ:樹木を数える
ドローンに搭載したカメラで撮影した画像から、指定エリア内にある樹木を数えることができます。
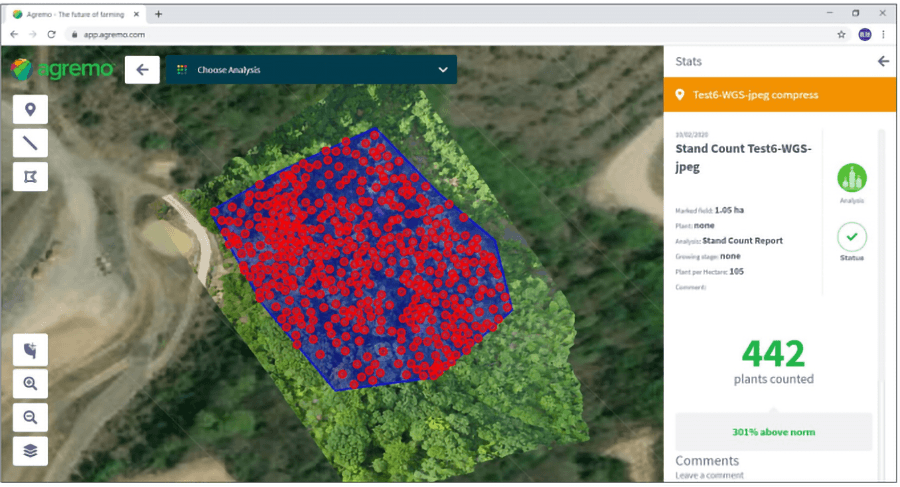
Metashape等で作成したオルソ画像を指定のクラウドにアップすることで、自動処理され、解析結果(エリア面積、樹木の本数)を取得できます。詳細は、弊社まで(info@opt-techno.com)お問い合わせください。
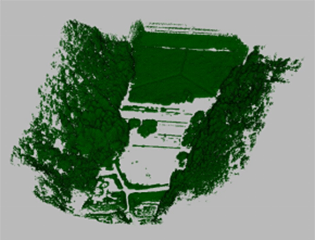
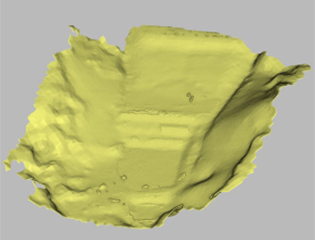
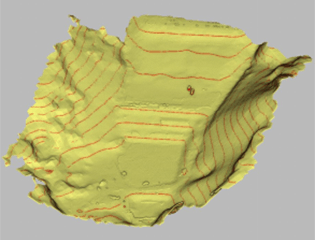
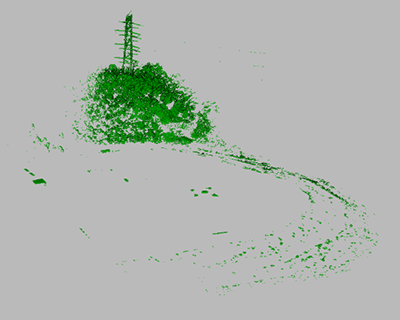
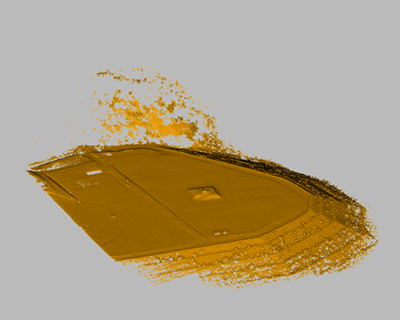
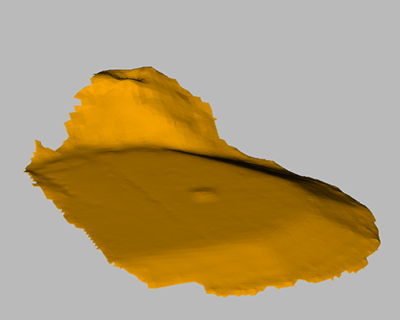
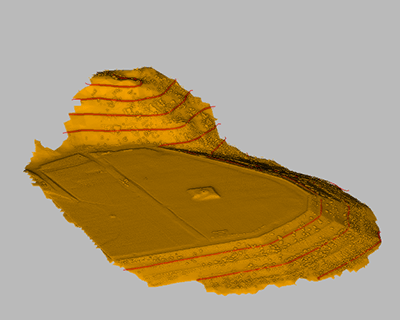
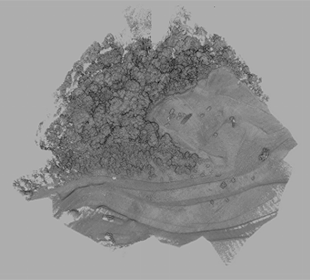
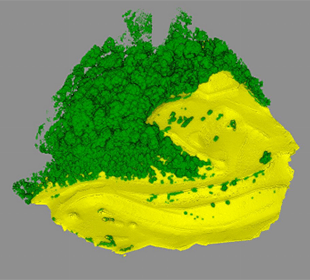
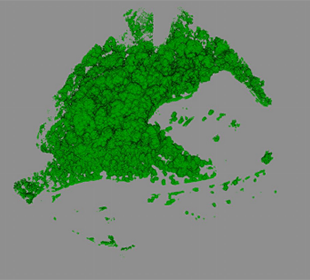
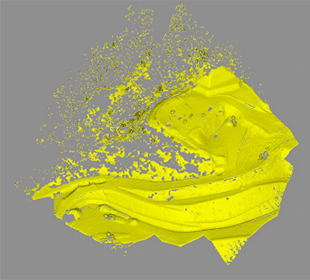
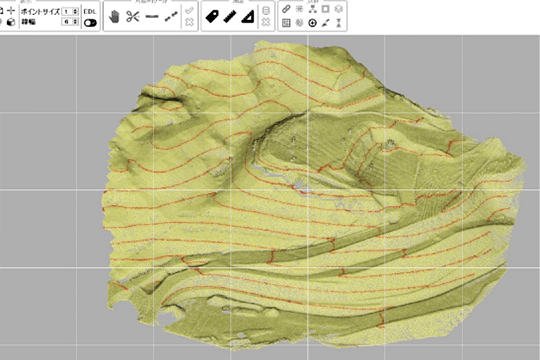
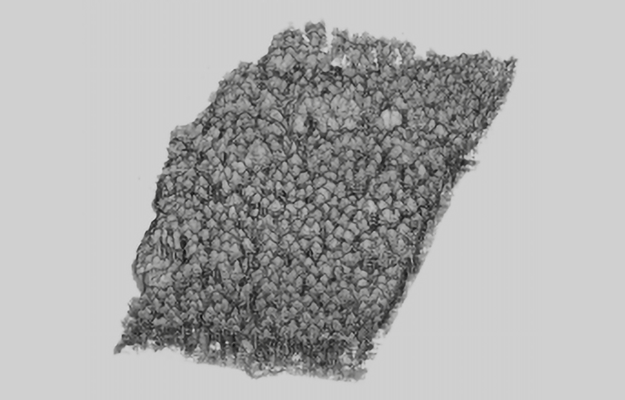
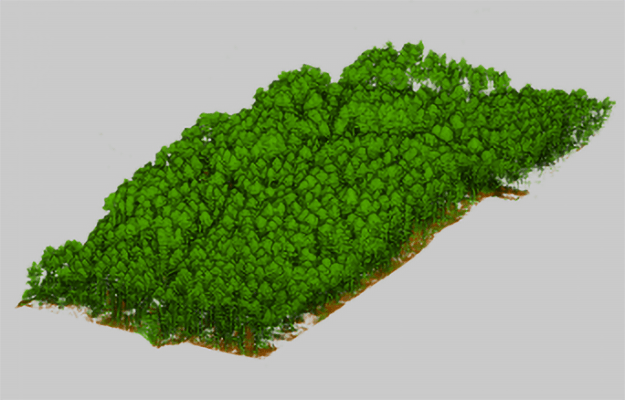
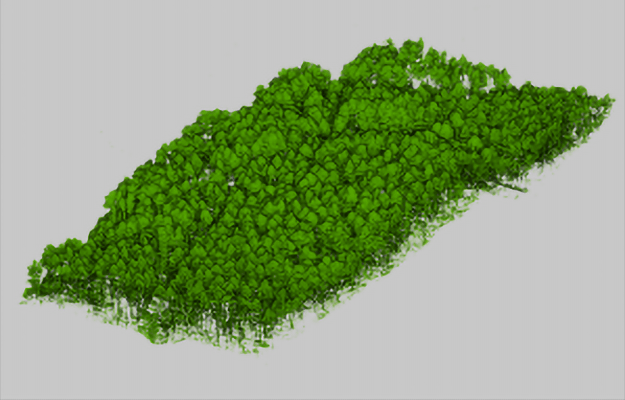
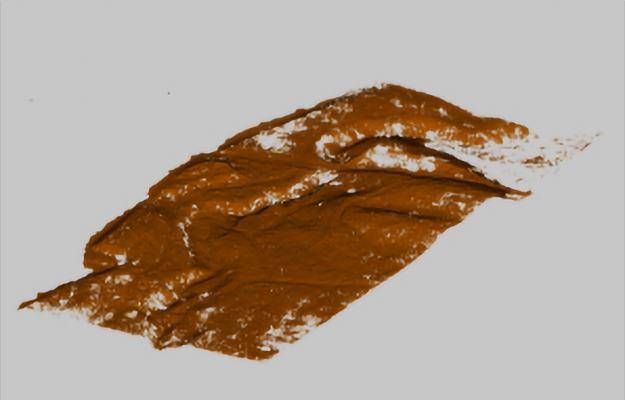
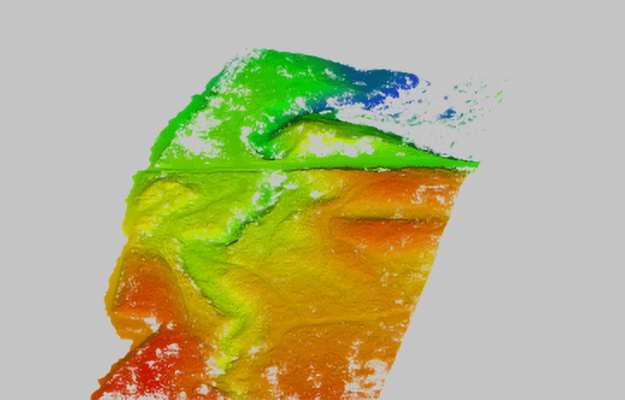
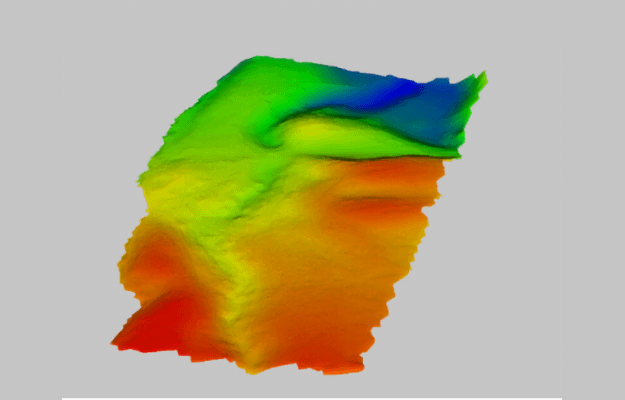
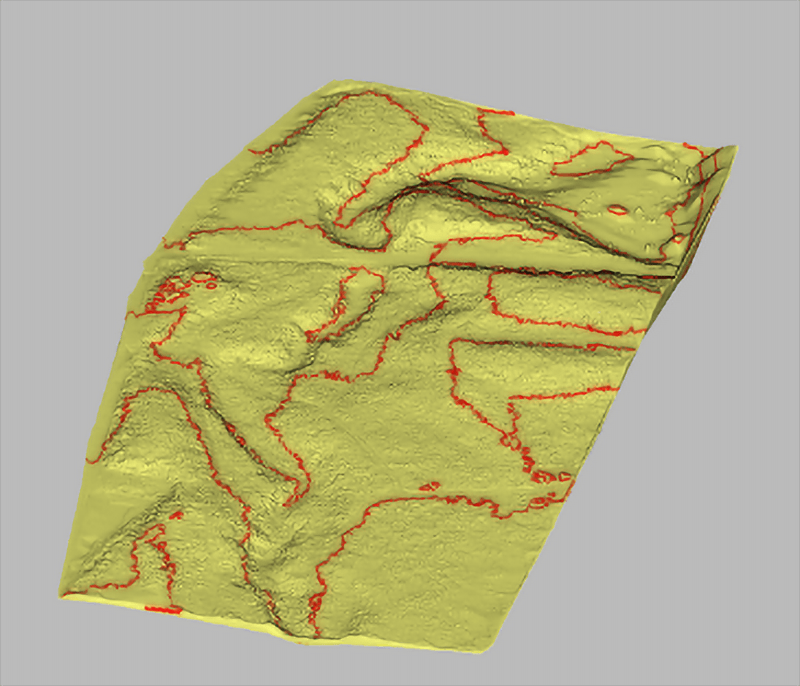
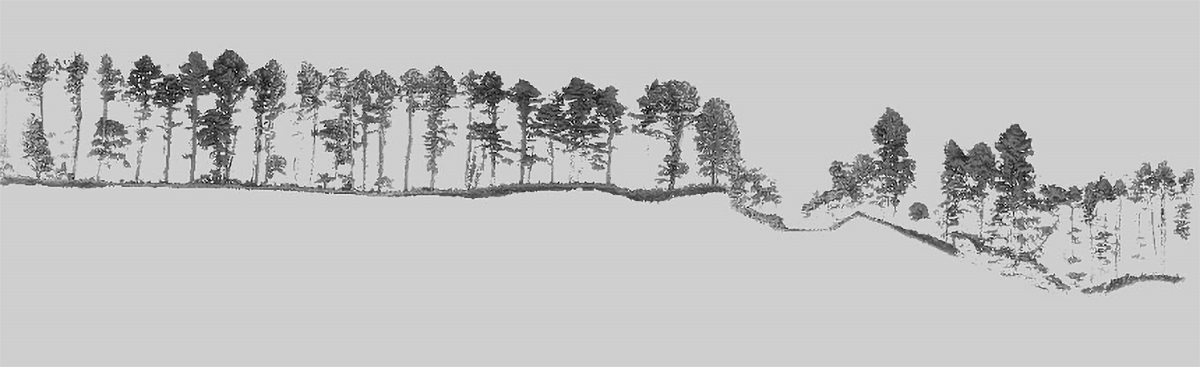
ユーザ事例 ④ :密集する森林を測量した。
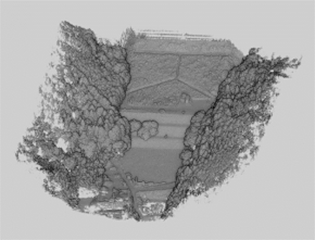
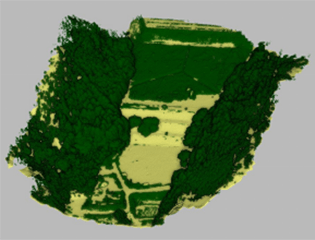
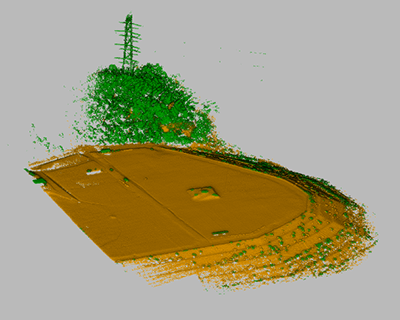
その結果は、想定以上に地表面のデータを抽出できた
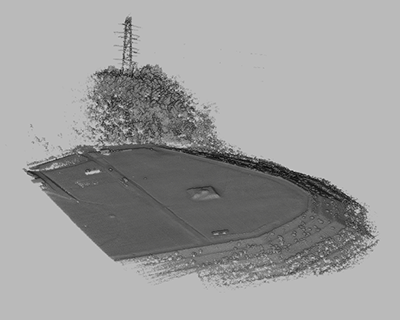
密集する森林から地表データと植生データを分離する作業を行ないました。エリアサイズは 300x 130m、コンタ作成まで数時間で完了しました。

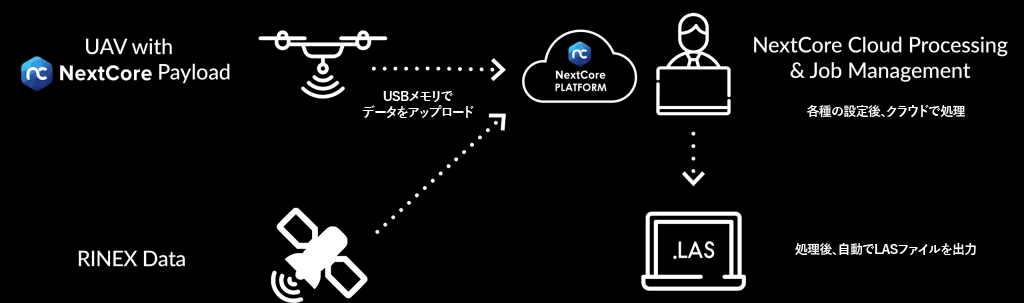
NextCore社製のドローンレーザー「NextCore RN100」は、スキャンに必要な機材をすべて含みます(ドローンは除く)。高速・高密度のLidarセンサーと高精度のIMU、およびGNSSアンテナを搭載しています。DJI社のドローン「Matrice 600 Pro」専用マウントキットが付属し、簡単に取り付けできます。レーザー用バッテリーは不要で、電源はドローンから供給されます。スキャンデータはそのままクラウドに送信し、ポスト処理(点群データの合成からLASデータ作成まで)を自動で行ないます。ユーザは単にクラウド上にデータをアップロードするだけです。
従来行なってきた長時間のデータ処理は不要となり、作業者の業務軽減になります。なお、秒速10mの単一フライトで約50ヘクタールのスキャンが可能です。
NextCore RN100の運用:
弊社は、ドローンレーザーの点群データとSfM写真計測ソフトのモデルを融合させ、精度の向上を図ります。その他、カメラで撮影した画像を点群処理ソフト(OPT Cloud Survey)に取り込むことで、基準点を見つけやすくなります。
ドローンレーザーの後処理は従来、時間のかかる作業でした。本システムでは、データ合成処理はクラウドで実行され、使用は無料です(昨年までは有料)。おおよそ数十分(あるいは10分程度)でLASデータが作成され、これまでの解析作業を大幅に削減できます。
ストリップアラインの必要性:
フライトコースごとの点群データ(ストリップ)は、飛行が進むにつれてオーバーラップを繰り返し、最終的にはひとつのモデルデータ(LAS)が作成されます。ドローンの飛行環境によっては、ねじれが生じたデータができ、その結果2重・3重のラインとして表示される場合があります。さらに、対空標識が判別できなくなったり、誤差として点群の厚みが大きくなります。
弊社が販売する「ストリップアライン・ソフトウェア」は、オーバーラップしたストリップを比較・補正して、合成データの誤差を最小限に抑えることができます。この解析作業は自動で行なわれます。ドローンレーザーの標準ソフトではなくオプション対応のソフトウェアですが、作業ワークフローでは必須の製品となります。
右側のカラーマップはZ値で、下の黒が0cmで上の白まで50cm。処理後のデータのRMS(平均二乗誤差)は2cm程度となる
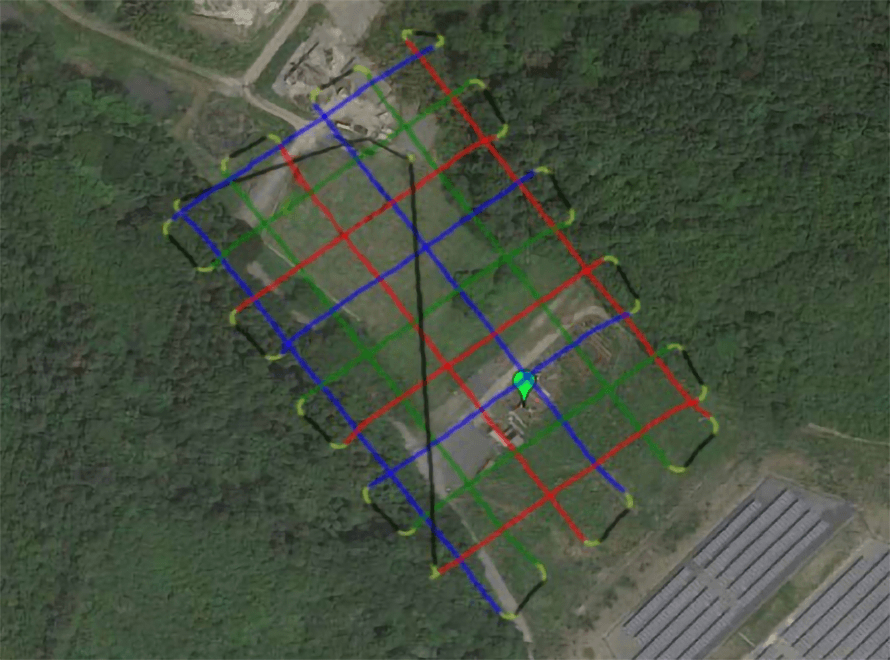
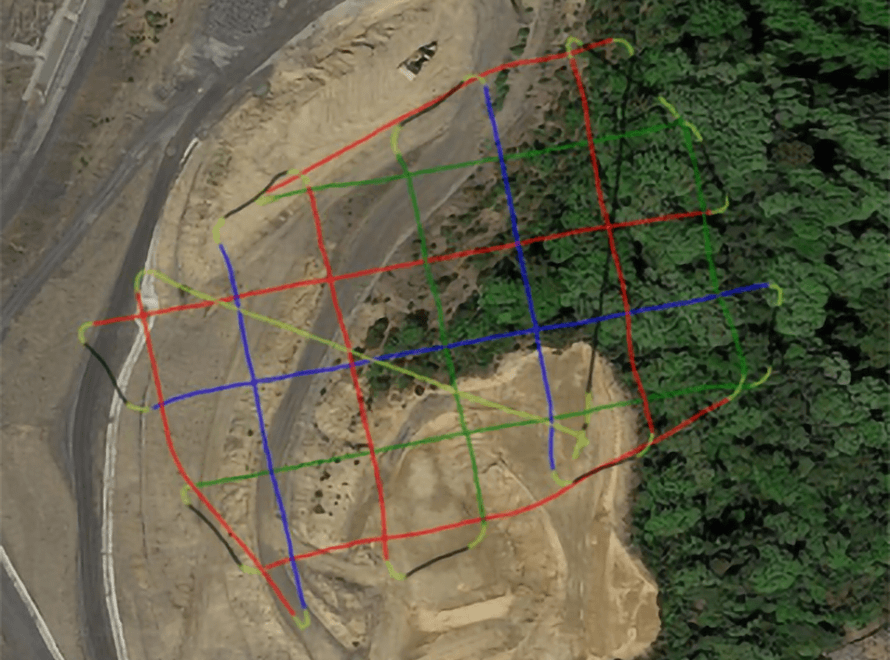
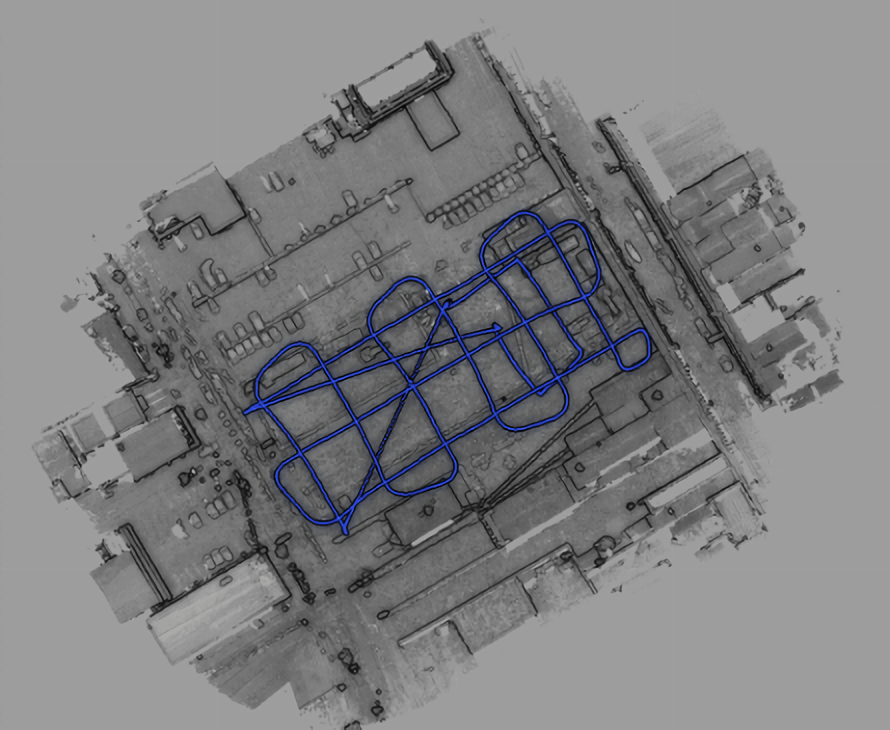
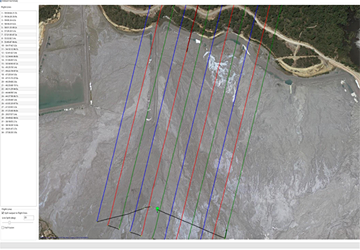
フライトコースごとのストリップ(点群データ)を手動で合成していくのはたいへんな作業で、高い合成精度を求めることは難しいのが現状です。本ソフトウェアは、こうした時間のかかる作業を短時間で完了させます。以下の画像はグリッドフライトを含めた9コースを示し、実際、このエリアを一括で解析し高精度の合成データを作成しています。処理時間は数分です。

ストリップアラインで精度を高める
ストリップをオーバーラップした後、IMUの姿勢と位置エラーを効率的に減らし、相対および絶対幾何誤差を改善させます。誤差を最小限に抑えるために最適化が行われ、従来のセンサーカリブレーションでは修正できなかったIMUのドリフトや振動を解析し、短時間で高い精度のデータを作成します。
ストリップアラインを使用する、もうひとつの理由(災害時での対応)
通常、NextCore Fusionソフトウェアで、RINEXを使用した軌跡解析(Post Processing)を行ないます。これはクラウドで処理されるものであり、必須のワークフローです。一方、災害時や緊急時には、とにかく、LAZデータと軌跡データは作成されたのか、現場で確認したい、あるいは、合成された点群データを見てみたいという希望があります。しかし、現場では携帯通信ができるとは限らず、RINEXデータを取得できない場合があります。この場合は、無理やりRINEXデータ無しで、自身のPCでNextCore Fusionソフトウェアでデータを処理することになります。処理されたデータは想像通り、合成精度の悪い“かなり荒れた”データとなります(当社調べ)。
この粗悪なデータでも、ストリップアライン・ソフトウェアは生データを元に自ら軌跡を作り上げ、ストリップアラインを実行し、合成されたひとつの点群データを作成します。その結果は、通常のワークフローで作成したデータと比べ、精度的に多少劣るほどで、かなり良いデータを生成します。本ソフトウェアは、緊急時に現場でデータを見たいという要望に対応できる製品です。

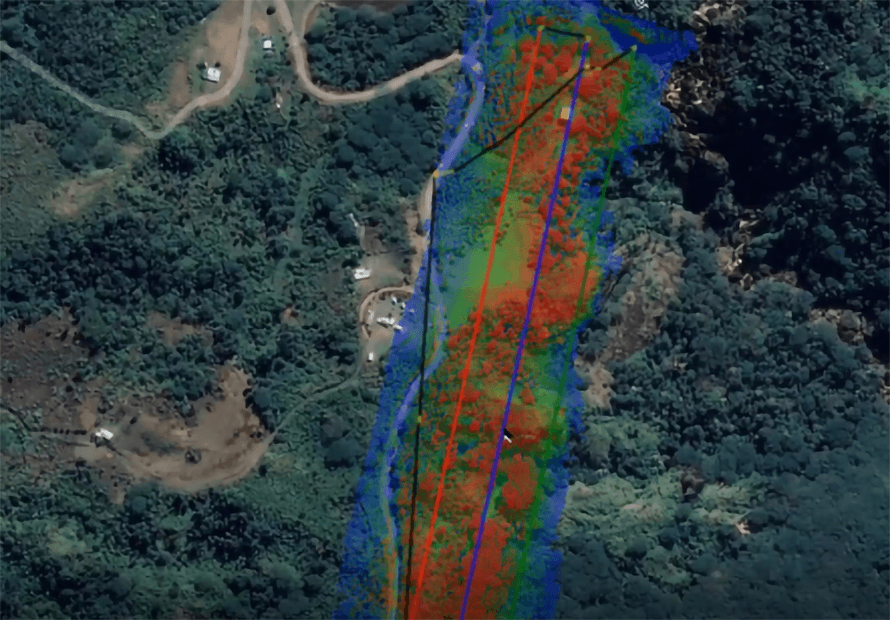
フライト後 直ちに点群データが取得されたか、現場で確認できます。
赤いエリアが点群密度が濃いところです。
モデルNextCore RN100の主な特長

- クラウド上で高速処理を行なう(点データの合成及びLAS変換の処理時間はフライト時間の約3倍)
- 多くの場合、作業現場から事務所へ戻る前にデータ処理が完了する
- クラウド上で処理するための費用は発生しません
- フライトごとのカリブレーションは不要
- RINEXデータを入手してクラウドにアップし、データ処理を行なう
または、自前のGNSSアンテナで取得したデータを使用可能 - カメラを搭載でき、カラー点群を作成できる(オプション)
写真計測ソフト(Metashape, 3DF Zephyrなど)で写真からオルソ画像を作成し、OPT Cloud Surveyソフトで点群データ上にオルソ画像を貼り付け、カラー点群データを作成する
フライトからLASデータの取得までの流れ
NextCore Fusionソフトウェア
デスクトップ及びクラウドベースでデータ処理するためのソフトウェアです。フライトライン、センサーからの距離、点群密度、重複フライトライン等を設定できます。
推奨のPCの仕様:
Windows 10 Pro, RAM: 32 GB, Hard Drive Space: 1GB以上
モデルNextCore RN100の仕様
モデルNextCore RN100の仕様
| 推奨UAV: DJI M600 Pro | |
|---|---|
| 絶対精度(Absolute Accuracy) | <50mm RMSE@50mレンジ |
| PP Attitude Heading RMS Error: | 0.03°IMU |
| レーザーの最大距離 | 200m (反射率80%) |
| スキャン速度 | 42万点/秒 (1リターン)/126万点/秒(3リターン) |
| 飛行時間 (M600に搭載時) | 最大23分 |
| スキャン範囲/秒速10mの単一フライト | 最大50ヘクタール |
推奨のオプション:
- (1)ハードウェア:
- カメラ(撮影、及びパイロットモニタリング用)、移動用ケース(カメラ装着のまま収納)
- (2)ソフトウェア:
-
点群処理ソフト(OPT Cloud Survey)用途:対空標識の取込み、thinning, カラー点群作成など
写真計測ソフト(各種) 用途:オルソ画像の作成、バンドル調整計算、JGD2011へ変換
ストリップアライン・ソフト 用途:点群データ(ストリップ)の合成精度を高める
点群データ用ジオイドコンバーター、用途:経緯度座標系⇔投影座標系の相互変換、JGD2011-標高へ変換
ライダーセンサーの仕様
| レーザー | クラス1, 波長 905nm |
|---|---|
| スキャナー視野角 | 垂直 20°x 水平 360° |
| 点のリターンの数/ショット | 3 |
| レーザーの数 | 8 |
| 精度(RMS Ranging Error) | 30mm |
| 推奨飛行高度(天候などによって異なります) | 50~100m |
ペイロードの寸法と質量
| 全体の質量 | 2.4kg |
|---|---|
| センサーの寸法(LxWxH) | 160mm x120mm x 230mm |
| M600マウントキットの質量 | 0.6kg |
| アンテナ用バーを広げた時の長さ | 1600mm |
| 全体の寸法(LxWxH) | 290mm x 140mm x 220mm |
※仕様は予告なく変更になる場合があります。