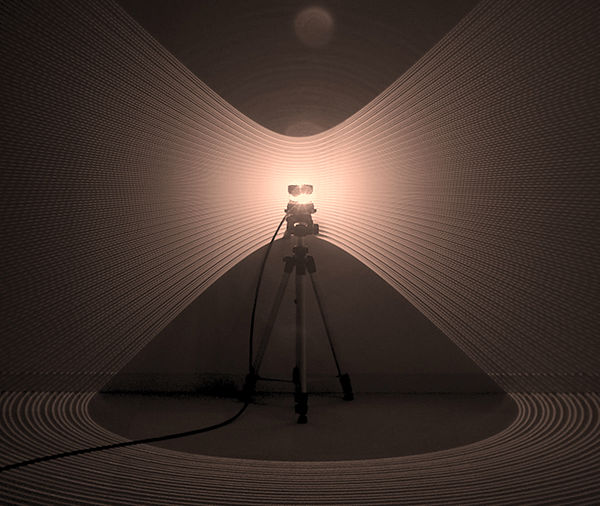
Raw point cloud of an OS0-128 on a drive through San Francisco. The sensor is on the front right corner of the vehicle.
Ouster OS0 in action
- Includes built-in IMU for SLAM algorithm support
- Creates a uniformly spaced point cloud and pixel-aligned 2D camera images for more efficient data processing, faster labeling, and streamlined algorithm application
May Mobilityは、超広角ライダーセンサーの採用なしには、
会社として自律モビリティのサービスを提供する今日の姿は無かったであろう。
- Tom Voorheis
Director of Autonomy Engineering, May Mobility
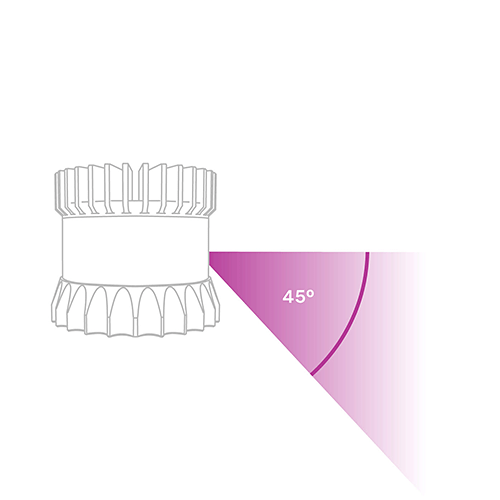
超広角のライダーLIDAR THAT SEES MORE
小型・軽量のモジュール設計INTEGRATION OPTIONS FOR ANY DEPLOYMENT

堅牢で信頼性の高いライダーALL-WEATHER TOUGH

データの品質ALGORITHM OPTIMIZED

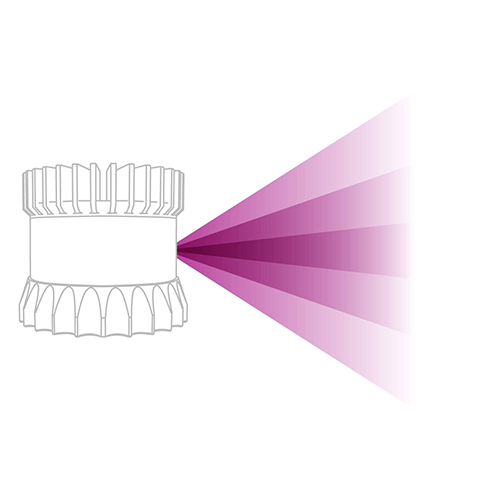
OS0ライダービームのコンフィグレーション
以下のとおり、業務に最適なビーム(チャネル)の配列を選択できます。なお、標準仕様はUniformで、他の2つはオプション対応となります。
-
Uniform
-
Gradient
-
Below horizon
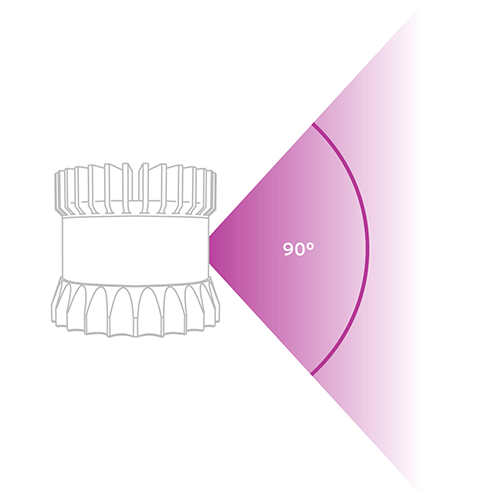
OS0ライダーセンサーの仕様
| OS0-32 | OS0-64 | OS0-128 | |
|---|---|---|---|
| チャネル数(垂直) | 32 channels | 64 channels | 128 channels |
| 解像度(水平) | 512, 1024, or 2048 | 512, 1024, or 2048 | 512, 1024, or 2048 |
| 距離 | 55 m | 55 m | 55 m |
| 視野角(垂直) | 90° (±45º) | 90° (±45º) | 90° (±45º) |
| 角度分解能(垂直) | 0.7º – 5.5º (multiple options) | 0.7º – 5.5º (multiple options) | 0.7º |
| 精度 | ±1.5 – 5 cm | ±1.5 – 5 cm | ±1.5 – 5 cm |
| 速度(点群の取得数/秒) | 655,360 | 1,310,720 | 2,621,440 |
| 回転速度 | 10 or 20 Hz | 10 or 20 Hz | 10 or 20 Hz |
| 電源 | 14 – 20 W | 14 – 20 W | 14 – 20 W |
| 質量 | 445 g | 445 g | 445 g |
| IPコード(防水防塵) | IP68, IP69K | IP68, IP69K | IP68, IP69K |
OS0 その他の機能
- PTP and NMEA/PPS time synchronization options
- Pluggable space-style bayonet connector
- On-the-fly programming of frame rate and horizontal resolution
- Over-the-network firmware updates
- Fixed angle data measurement
- Class 1 Eye Safe per IEC/EN 60825-1:2014
- Multi-sensor crosstalk resistance
- Output: range, intensity, reflectivity, ambient NIR, azimuth angle, time stamp
OS0ライダーセンサーのアクセサリー
| センサーのキャップ | Radial | ||
| コネクター | Straight | ||
| インタフェース | Interface box | Pig-tail cable | |
| ケーブルの長さ(標準は5m) | 2 m | 5 m | 10 m |