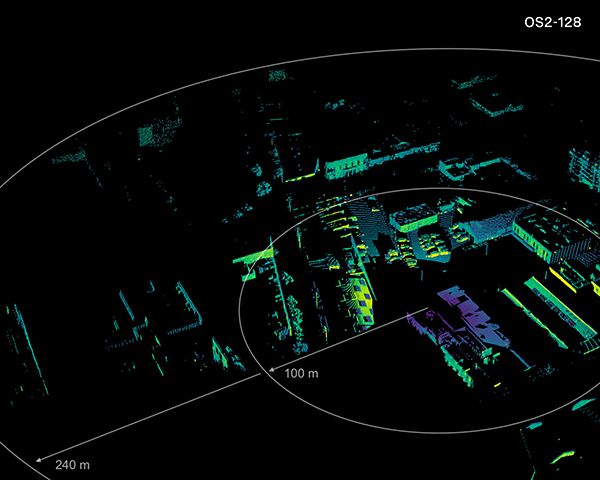
Raw point cloud of an OS2-128 drive in San Francisco.
Ouster OS2 in action
- Includes built-in IMU for SLAM algorithm support
- Creates a uniformly spaced point cloud and pixel-aligned 2D camera images for more efficient data processing, faster labeling, and streamlined algorithm application
Ouster OS2が持つ解像度と信頼性のソリューションのおかげで、
我々が提供する長距離・認識技術を高めることができた。
- Gary Hicok
Senior Vice President of Automotive Hardware and Systems, NVIDIA
検出距離 200m以上のセンサーLONG RANGE VISION

高解像度ENHANCED PERCEPTION
堅牢で信頼性の高いライダーALL-WEATHER TOUGH

ファームウェアの更新GREAT KEEPS GETTING BETTER
高い頻度でファームウェアを更新でき、機能の追加やセンサーのパフォーマンスを向上させます。
Learn moreデータの品質ALGORITHM OPTIMIZED
ライダーのデータはStructure構造で比類のない高品質の反射強度データを検出し、同時にアルゴリズムの効率性と精度を高めます。
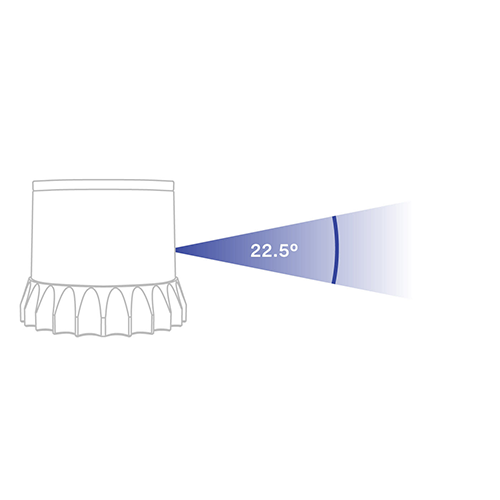
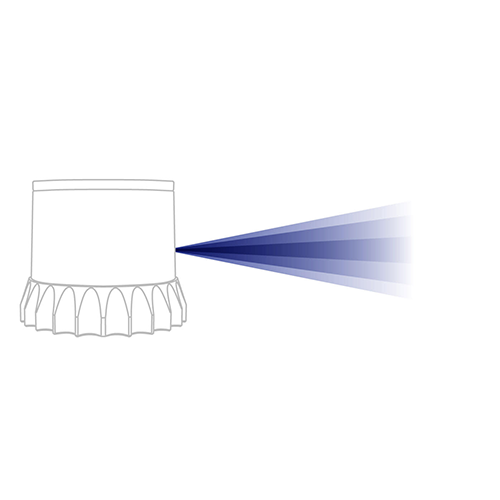
Learn moreOS2ライダービームのコンフィグレーション
以下のとおり、業務に最適なビーム(チャネル)の配列を選択できます。なお、標準仕様はUniformで、他の2つはオプション対応となります。
-
Uniform
-
Gradient
-
Below horizon
OS2ライダーセンサーの仕様
| OS2-32 | OS2-64 | OS2-128 | |
|---|---|---|---|
| チャネル数(垂直) | 32 channels | 64 channels | 128 channels |
| 解像度(水平) | 512, 1024, or 2048 | 512, 1024, or 2048 | 512, 1024, or 2048 |
| 距離 | 240 m | 240 m | 240 m |
| 視野角(垂直) | 22.5° (±11.25º) | 22.5° (±11.25º) | 22.5° (±11.25º) |
| 角度分解能(垂直) | 0.18º – 0.73º (multiple options) | 0.18º – 0.73º (multiple options) | 0.18º |
| 精度 | ±1.5 – 5 cm | ±1.5 – 5 cm | ±1.5 – 5 cm |
| 速度(点群の取得数/秒) | 655,360 | 1,310,720 | 2,621,440 |
| 回転速度 | 10 or 20 Hz | 10 or 20 Hz | 10 or 20 Hz |
| 電源 | 14 – 20 W | 14 – 20 W | 14 – 20 W |
| 質量 | 930 g | 930 g | 930 g |
| IPコード(防水防塵) | IP68, IP69K | IP68, IP69K | IP68, IP69K |
OS2 その他の機能
- PTP and NMEA/PPS time synchronization options
- Industry-leading intrinsic calibration; no recalibration needed
- On-the-fly programming of frame rate and horizontal resolution
- Pluggable space-style bayonet connector
- Fixed angle data measurement
- Over-the-network firmware updates
- Multi-sensor crosstalk resistance
- Class 1 Eye Safe per IEC/EN 60825-1:2014
OS2ライダーセンサーのアクセサリー
| コネクター | Straight | ||
| インタフェース | Interface box | Pig-tail cable | |
| ケーブルの長さ(標準は5m) | 2 m | 5 m | 10 m |