全方位ライダーセンサー (チャネル数:16, 32, 64, 128)
業界最低価格 、自動運転、ロボット制御、ドローン搭載、セキュリティ分野で利用
お知らせ:
弊社で作成した以下の資料をLidarの納品時にご提供可能です。
操作手順
IMUと画像データ(range, signal, ambient images)の取得手順
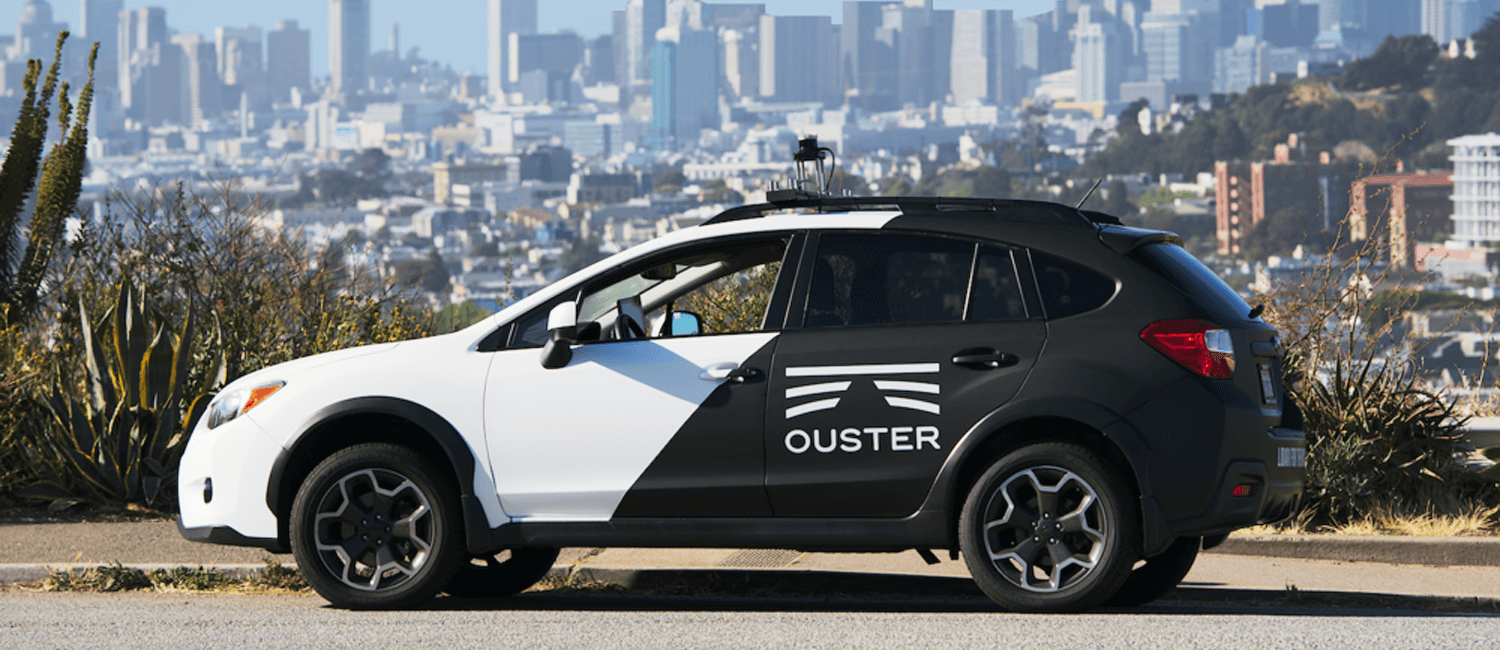
Ouster OS1-128をデモいたします。
会期
2021年5月12日(水)〜14日(金)
会場
幕張メッセ
VIDEO
上段:反射強度(intensity)、
Speed x2
VIDEO
上段:反射強度(intensity)、
Speed x2
OUSTER社製の全方位ライダーセンサーは、最も小型・軽量であり、高精度・高密度の測距データを出力します。自動運転、ロボット制御、ドローン搭載3Dスキャナー、地上測量業務など幅広く利用されています。
ライダーセンサーの市場
AVs
Mapping
Robotics
Drones
Mining
Smart cities
VIDEO
上段:反射強度(intensity)、中段と下段:スキャン生データ。センサーはOS-1-64を使用
VIDEO
上段:反射強度(intensity)、中段と下段:スキャン生データ。センサーはOS-1-64を使用
VIDEO
Realtime SLAM from the OS-1-64
VIDEO
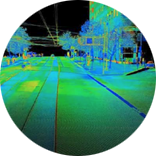
画面内の帯(上から下へ):周辺画像、反射強度、レンジ(距離)、点群データ。


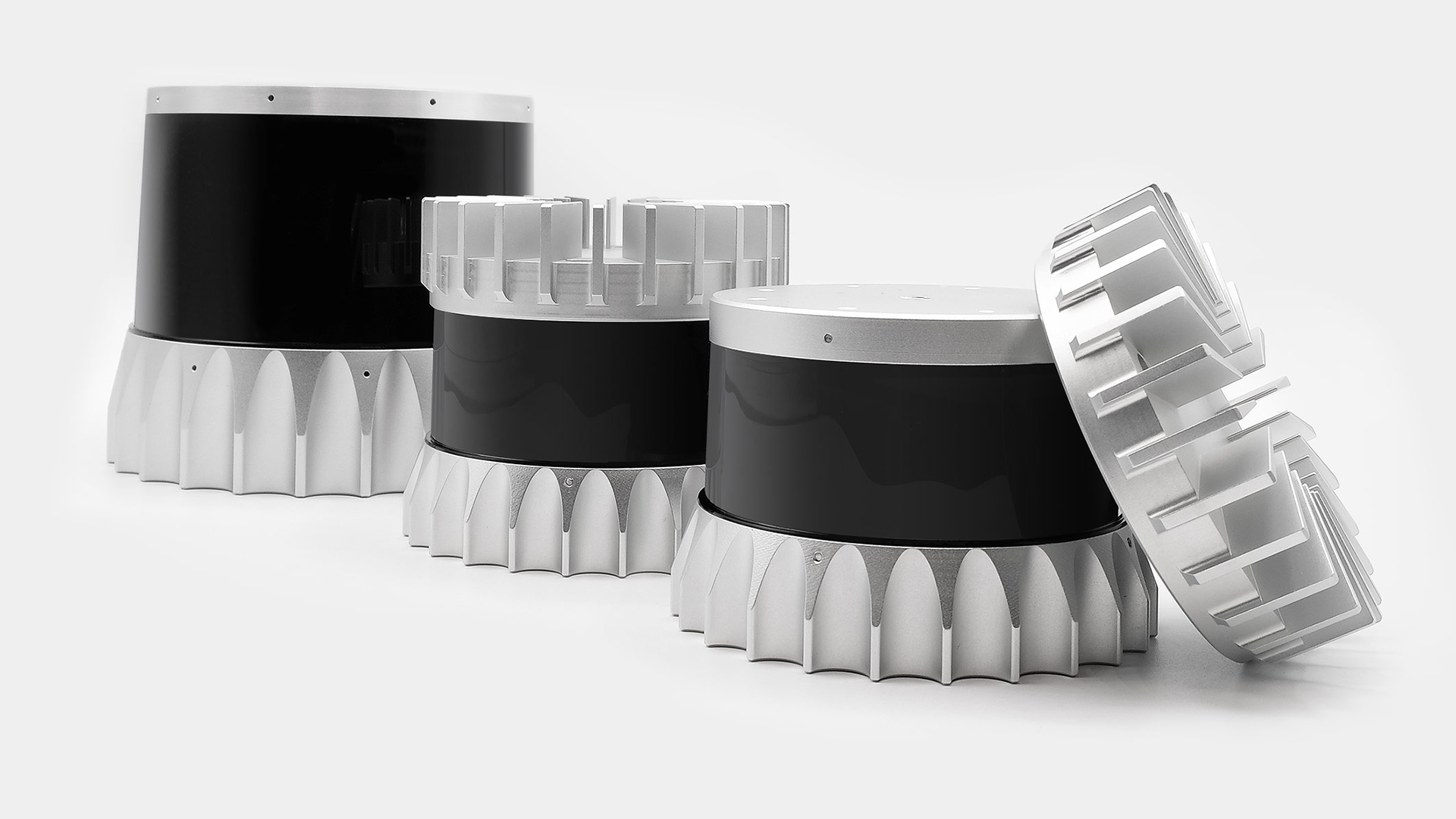
 OS0
ULTRA-WIDE VIEW LIDAR SENSOR
OS0
ULTRA-WIDE VIEW LIDAR SENSOR
 OS1
MID-RANGE LIDAR SENSOR
OS1
MID-RANGE LIDAR SENSOR
 OS2
LONG-RANGE LIDAR SENSOR
OS2
LONG-RANGE LIDAR SENSOR

 IPコードはIP68, IP69K
IPコードはIP68, IP69K 衝撃と振動
衝撃と振動 使用環境
使用環境